In this article, I'll show you how I turned my manual height-adjustable desk into an automated IoT desk. I'll cover how to size and run the motors, and how to connect your IoT device to Google using Heroku as the public interface. In short, this project has two features. First: the table connects from Google Smart Home to Heroku using voice commands, and second: Heroku and the table itself communicate using the MQTT Internet of Things protocol. MQTT is a good solution for the Internet of Things and also for overcoming some of the other obstacles that we will have to face.
First of all, I will say that I did this project just to have fun. I hope you find the article entertaining and that it motivates you to take the time to do something of your own.
The same table
Hardware
The first and probably most difficult part of the job is redoing the table. In a previous life, the table had a detachable handle, it was located at the edge of the tabletop. At first I thought about attaching something to the handle hole without having to interfere with the design of the table. I purchased several drives to figure out how to attach the motor to the table, but to no avail. Then an idea appeared: a rod running the length of the entire table, which would connect its legs so that they would lower and rise at the same time. If I attach a suitable drive to the rod, then I can use a belt to connect the rod and the motor. It would also be possible to equip the table with a motor without interfering too much with its design.
Possibilities
Dynamic systems have two axes of rotation:
- one can move 360 degrees relative to the center in the tool’s rotation axis, most often this is the Z coordinate;
- 120 degrees - movement along the axis of swing of the structure.
A collet clamp can be used to hold the part: manual or pneumatic. Vacuum systems that operate on the suction cup principle are also used. The advantage of the latter is the ease of changing the workpiece without clamping devices.
The rotation speed can reach 1000 rpm, which can significantly speed up the processing of parts. To protect the moving parts, a bakelite panel is used. If the tool makes unexpected contact, the automatic cycle will stop.
The Importance of Torque
After ordering the drive and belt I needed, I started looking on Amazon for a high torque motor.
And - oh, miracle! — I found many suitable engines! Or so it seemed to me... Having bought a small motor, I waited about a month for its arrival from China. I was so excited when the motor finally arrived! I couldn't wait for the weekend to finally put everything together and have my motorized desk. Things didn't go according to plan. I spent the day cutting a hole for a rod in the metal paneling of the table. At that point I only had hand tools, so the process took longer than I expected. Towards the end of the day I finished assembling the table and was ready to try it out.
I turned on the motor, the voltage on my desktop power supply and... nothing happened. A few moments later, the motor began to rotate and grind the teeth of the purchased belt. I learned two lessons from this: the belt obviously doesn't do the job, and "High Torque Motor" doesn't mean "I can lift anything." Second lesson: you need to look at the size of the motor compared to your fingers. Mine turned out to be tiny!
On the left in the photo is the motor and belt. At the top right is a motor attached to the table (you'll see more about what's going on later). Bottom right is the motor in position on the table.
Shape and materials
The countertop is most often made of wood or its substitutes:
- Chipboard. The most budget-friendly material. Disadvantage: a little fragile, which reduces its service life.
- Fiberboard. A more reliable, expensive material compared to chipboard. Advantages: high resistance to damage, good moisture resistance.
- Solid wood. The most expensive, but also the strongest and most durable raw material for the production of adjustable tables.
Sometimes metal is used to make adjustable tables. This is a heavy and reliable material with high resistance to damage, but is used exclusively for furniture that will be used for industrial purposes. The table is made of strong and durable steel, which significantly increases the cost of the product, or of aluminum, a soft and less wear-resistant, but cheaper alternative. Legs are rarely made of wood, but solely for decorative purposes (as a covering); they will still be based on hard iron.
The ergonomics of the product largely depends on the shape of the tabletop. Corner models will help save space in a small apartment and use space efficiently: the furniture is simply moved to the corner of the room. This is the optimal solution for those who work at a computer. The second option is a standard rectangular table. It is universal for any specific activity, great for narrow spaces, and also allows you to organize a comfortable work area in the office. In addition, there are round design options - with their help you can beautifully arrange a work area in the living room or bedroom. Such a table often provides a comfortable recess for a seated person.
Suitable motor
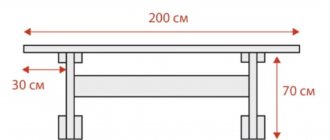
To select the appropriate motor, it was necessary to calculate how much torque was required to raise the tabletop.
I was surprised at how easy it was to do. Torque is force multiplied by the length of the lever arm. Well, I had the lever arm (this is the handle of the table), I just needed to calculate the force that would easily turn the lever arm. I loaded the table by strapping a milk jug to the handle and gradually added water to the jug until the lever began to rotate. Turning the handle up with the jug filled, I made sure that the weight easily turned the handle. I found out that the lever arm length is 11 cm and the required force is 4 lbs. Substituting these numbers into the formula, I found out that the motor must produce a torque of at least 19.95 kgf.cm. And he began to look for him.
I decided to redo the table permanently. I knew that the rod passing through the middle of the table was hollow. By looking for a twin shaft motor, I could cut the rod and reassemble it with the motor in the middle. By purchasing two motors with a torque of 20 kgf.cm, I ensured that there was enough torque to lift the table.
On another fine Saturday, I disassembled my table into four parts, filing the motor shafts so that they could be used when assembling the rod. I made more holes in the metal to accommodate the motors. This time there was no belt: the motors were connected directly to the rod, the holes were quite large. As evening wore on, I reassembled the desk and loaded it with office supplies.
The top two photos are the motors fully installed on the table.
The two bottom photos are of an integrated rod that runs along the length of the table with the help of motors. I connected the motors and connected them to the power supply. When I turned on the power, I saw the table move! This time I was more confident because I had chosen the correct motor sizes. I doubled the engines power just to be sure, but it was amazing to see them moving!
However, let me clarify that the table was slow. I made a video to show a friend how the table works, but he had to turn on the time acceleration on the video so as not to watch 5 minutes of the table changing the position of the tabletop.
Tools
- ushm;
- welding machine;
- calipers;
- roulette;
- screwdriver;
- spanners;
- pliers;
- drill;
- screwdriver;
- tap M 6;
- tester.
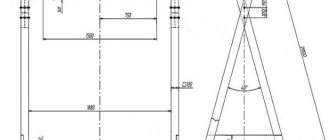
The frame of the machine is assembled according to the classical scheme from metal corners with sides 40x40 mm using welding. For craftsmen working with metal, there will be no difficulties. The figure shows the dimensions of the sides of the frame:
Dimensions of the sides of the frame for the machine
The frame design is similar in shape to a high stool without a saddle.
Turnovers are important. Final version
I finally realized that it all comes down to two things: torque and RPM.
It was necessary to find a motor with a sufficient number of revolutions at an already known torque. It wasn't that difficult. Although I did not find a dual shaft motor, I did find a right angle gearbox that converts a single shaft motor into a dual shaft motor.
Long story short, the next month was a month of waiting for the transmission from China, and the Saturday after the wait I had a table that moved at the right speed.
The last motor itself is on the left, and the installed one is on the right. A little hardware and a lot of software.
I wasn't happy with the huge power supply sitting on my desk just to control the height of the tabletop. In addition, in order to change the position of the table from one to another and back again, I swapped the wires. A small problem, but the design was made to ideally just press a button and have several height presets.
How to choose
Before you go to the store, you should ask yourself, what kind of height-adjustable table do you actually need? First of all, you need to proceed from the tasks, the solution of which will justify the feasibility of such a purchase. The second important factor is size. Such tables are quite large in size, so it makes sense to take measurements in advance of the place where it should stand.
Such furniture adapts to a person’s height and ergonomics, which allows him or her not to slouch while working.
In general, it is recommended to pay attention to the following:
- Structural diagram. Mechanical lifting or using electric drives.
- Material. If a large load is expected (monitor, printer, system unit), it is better to choose models with a metal frame and a massive tabletop. Models for paper work may be simpler.
- Number of supports. Again, it all depends on the load.
- Maximum lift height.
- Frequency of use. How often is the height supposed to be adjusted?
Note! In some tables with a mechanical lifting system, the adjustment process is carried out using a pin in the corresponding hole on the support. This means that you will have to remove all objects from the countertop that could fall during this procedure, which is extremely inconvenient if such an action must be performed constantly.
Adjustable furniture is an excellent prevention of various diseases of the spinal column.
Bluetooth
The first solution was to add Bluetooth to the table.
After all, it seems like almost every device in the house has Bluetooth, and the phone seems like a convenient control interface for something like my desk. So now I bought a motor controller board, a Nordic NRF52 Bluetooth board, distance sensors and started messing around with the controller firmware.
At the end of the article I will leave links to the software and firmware that I wrote for the project. Feel free to comment on the code: I don't do firmware professionally and would like some guidance.
As a quick introduction, the ESP32 is written in C++ using Arduino libraries to interface with the BLE Terminal app on the phone. Installing and configuring BLE is quite complex. First you need to create all the characteristics for the values that you would like to control via BLE. Think of a characteristic as a variable in your code. BLE wraps a variable in many handlers to get and set the value of that variable.
The characteristics are then packaged into a service with its own UUID, which makes the service unique and identifiable from the application. Finally, you must add this service to the advertisement payload so that your service can be discovered by the device. When a remote device connects to your service and sends data via characteristics, the table recognizes that the user wants to adjust the height to a different preset and begins to move.
To adjust the height, the tabletop has a TFMini-S LiDAR sensor built into the bottom that determines the current height. It's a funny sensor: it's called LiDAR, but it's actually a laser. It uses optics and an LED to determine the flight time of IR radiation. One way or another, the sensor determines the height of the table. The control board then detects the difference between the current height and the requested height and starts the motor, which rotates in the desired direction. Some major parts of the code are below, but you can see the entire file here.
void setup() { Serial.begin(115200); Serial2.begin(TFMINIS_BAUDRATE); EEPROM.begin(3); // used for saving the height presets between reboots tfminis.begin(&Serial2); tfminis.setFrameRate(0); ledcSetup(UP_PWM_CHANNEL, PWM_FREQUENCY, PWM_RESOLUTION); ledcAttachPin(UP_PWM_PIN, UP_PWM_CHANNEL); ledcSetup(DOWN_PWM_CHANNEL, PWM_FREQUENCY, PWM_RESOLUTION); ledcAttachPin(DOWN_PWM_PIN, DOWN_PWM_CHANNEL); state_machine = new StateMachine(); state_machine->begin(*t_desk_height, UP_PWM_CHANNEL, DOWN_PWM_CHANNEL); BLEDevice::init("ESP32_Desk"); ... BLEServer *p_server = BLEDevice::createServer(); BLEService *p_service = p_server->createService(BLEUUID(SERVICE_UUID), 20); /* ——————- SET HEIGHT TO PRESET CHARACTERISTIC ————————————— */ BLECharacteristic *p_set_height_to_preset_characteristic = p_service->createCharacteristic(...); p_set_height_to_preset_characteristic->setCallbacks(new SetHeightToPresetCallbacks()); /* ——————- MOVE DESK UP CHARACTERISTIC ———————————————- */ BLECharacteristic *p_move_desk_up_characteristic = p_service->createCharacteristic(...); p_move_desk_up_characteristic->setCallbacks(new MoveDeskUpCallbacks()); /* ——————- MOVE DESK UP CHARACTERISTIC ———————————————- */ BLECharacteristic *p_move_desk_down_characteristic = p_service->createCharacteristic(...); p_move_desk_down_characteristic->setCallbacks(new MoveDeskDownCallbacks()); /* ——————- GET/SET HEIGHT 1 CHARACTERISTIC —————————————— */ BLECharacteristic *p_get_height_1_characteristic = p_service->createCharacteristic(...); p_get_height_1_characteristic->setValue(state_machine->getHeightPreset1(), 1); BLECharacteristic *p_save_current_height_as_height_1_characteristic = p_service->createCharacteristic(…); p_save_current_height_as_height_1_characteristic->setCallbacks(new SaveCurrentHeightAsHeight1Callbacks()); /* ——————- GET/SET HEIGHT 2 CHARACTERISTIC —————————————— */ … /* ——————- GET/SET HEIGHT 3 CHARACTERISTIC ——— ——————————— */ … /* ——————- END CHARACTERISTIC DEFINITIONS —————————————— */ p_service->start(); BLEAdvertising *p_advertising = p_server->getAdvertising(); p_advertising->start(); xTaskCreate( updateDeskHeight, // Function that should be called "Update Desk Height", // Name of the task (for debugging) 1024, // Stack size NULL, // Parameter to pass 5, // Task priority NULL // Task handle); } There's a lot more going on in the file, but this code has enough context to understand what's going on. Note that we create and configure all BLE callbacks for all characteristics, including manual movement, setting and retrieving preset values, and most importantly, aligning the table according to the preset.
The image below shows the interaction with the characteristics for adjusting the table height. The final piece of the puzzle is the state machine, which knows the current table height, the user's desired height, and operates on those two values.
So finally I had a table that did everything I wanted. I could save heights to presets and retrieve heights from memory to set the desk to my favorite positions. I used BLE Terminal on my phone and computer so I could send raw messages to my desk and monitor its position. It worked, but I knew the battle with BLE was just beginning.
A bare bluetooth interface... All that remained at the moment was to learn how to write applications for iOS...
After all this, my wife said something that changed the whole project: “What if we made it controlled by your voice?”
In addition to being cool and adding a new device to the Google Assistant list, there was no need to write an application for iOS to control the table. And you no longer had to take out your phone to adjust the height. Another small victory!
Installation
Using welding, we make the upper part of the frame in the shape of a rectangle. Side dimensions 600x500 mm. Observing the geometry (equal diagonals), we weld 4 legs, each 750 mm high.
To add rigidity to the structure, we mount the lower part of the frame by welding.
The design of the future machine is ready.
On two U-shaped channels 3 we mount the shaft of a saw blade, also purchased at a flea market. Next, install it on the upper frame and secure it with M8 bolts. Check the free play of the shaft. If necessary, we adjust the installed channels on the frame.
The next step will be installing the electric motor.
We first prepare the platform on 2 corners 2. Using a grinder or a jigsaw with a metal file, we make small cuts, as shown in the figure, to adjust the tension of the drive belt. We install the electric motor on the finished platform in such a way that the pulleys on the motor and on the shaft do not have distortions. Otherwise, the drive belt will wear out quickly.
We install an L-shaped galvanized sheet over the engine to protect against sawdust.
The author, through a starting device, connected a cord with a plug to the engine for connecting to the electrical network, and mounted a double socket from an extension cord inside the frame on the end side. If necessary, you can connect other power tools to this outlet.
Adding IoT
Now let's talk about upgrading the table to voice control via Google Smart Home and how to connect it with Wi-Fi.
Adding Wi-Fi was easy enough. I replaced the Nordic NRF52 microcontroller with an ESP32 with built-in WiFi. Most of the software was portable because it was written in C++, and both devices could be programmed using Platform.IO and Arduino libraries, including tfmini-s, which I wrote to measure the current height of the table.
Below is the architecture of the table interaction system with Google Smart Home. Let's talk about the interaction between me and Google.
So, Bluetooth was turned on. It's time to figure out how to interact with Google Smart Home. This technology controlled the home using Smart Home Actions. What's interesting about its actions is that the service acts as an OAuth2 server, and not as a client. Most of the work done on the server involved implementing an OAuth2 Node.js Express application that reaches Heroku and acts as a proxy between Google and my desk.
I was lucky: there was a decent implementation of the server using two libraries. The first library, node-oauth2-server, was found here. The second express-oauth-server library for Express connectivity was found here.
const { Pool } = require("pg"); const crypto = require("crypto"); const pool = new Pool({ connectionString: process.env.DATABASE_URL }); module.exports.pool = pool; module.exports.getAccessToken = (bearerToken) => {...}; module.exports.getClient = (clientId, clientSecret) => {...}; module.exports.getRefreshToken = (bearerToken) => {...}; module.exports.getUser = (email, password) => {...}; module.exports.getUserFromAccessToken = (token) => {...}; module.exports.getDevicesFromUserId = (userId) => {...}; module.exports.getDevicesByUserIdAndIds = (userId, deviceIds) => {...}; module.exports.setDeviceHeight = (userId, deviceId, newCurrentHeight) => {...}; module.exports.createUser = (email, password) => {...}; module.exports.saveToken = (token, client, user) => {...}; module.exports.saveAuthorizationCode = (code, client, user) => {...}; module.exports.getAuthorizationCode = (code) => {...}; module.exports.revokeAuthorizationCode = (code) => {...}; module.exports.revokeToken = (code) => {...}; Next comes setting up the Express application itself. Below are the endpoints required for the OAuth server, but you can read the full file here. const express = require("express"); const OAuth2Server = require("express-oauth-server"); const bodyParser = require("body-parser"); const cookieParser = require("cookie-parser"); const flash = require("express-flash-2"); const session = require("express-session"); const pgSession = require("connect-pg-simple")(session); const morgan = require("morgan"); const { google_actions_app } = require(“./google_actions”); const model = require(“./model”); const { getVariablesForAuthorization, getQueryStringForLogin } = require(“./util”); const port = process.env.PORT || 3000; // Create an Express application. const app = express(); app.set("view engine", "pug"); app.use(morgan("dev")); // Add OAuth server. app.oauth = new OAuth2Server({ model, debug: true, }); // Add body parser. app.use(bodyParser.urlencoded({ extended: false })); app.use(bodyParser.json()); app.use(express.static("public")); // initialize cookie-parser to allow us access the cookies stored in the browser. app.use(cookieParser(process.env.APP_KEY)); // initialize express-session to allow us track the logged-in user across sessions. app.use(session({...})); app.use(flash()); // This middleware will check if the user's cookie is still saved in browser and user is not set, then automatically log the user out. // This usually happens when you stop your express server after login, your cookie still remains saved in the browser. app.use((req, res, next) => {...}); // Post token. app.post("/oauth/token", app.oauth.token()); // Get authorization. app.get("/oauth/authorize", (req, res, next) => {...}, app.oauth.authorize({...})); // Post authorization. app.post(“/oauth/authorize”, function (req, res) {…}); app.get(“/log-in”, (req, res) => {…}); app.post("/log-in", async (req, res) => {...}); app.get("/log-out", (req, res) => {...}); app.get("/sign-up", async (req, res) => {...}); app.post("/sign-up", async (req, res) => {...}); app.post("/gaction/fulfillment", app.oauth.authenticate(), google_actions_app); app.get('/healthz', ((req, res) => {…})); app.listen(port, () => { console.log(`Example app listening at port ${port}`); }); There is quite a lot of code, but I will explain the main points. The two OAuth2 routes used by the server are /oauth/token and /oauth/authorize. They are used to obtain a new token or refresh expired tokens. Next, you need to make the server respond to Google's action. You'll notice that the /gaction/fulfillment endpoint points to the google_actions_app object.
Google sends requests to your server in a specific format and provides a library to help process those requests. Below are the functions needed to communicate with Google, and the entire file is here. Finally, there is the /healthz endpoint, which I'll cover at the end of the article.
The /gaction/fulfillment endpoint uses a middleware called app.oauth.authenticate(), the hard work of running the OAuth2 server went into making this middleware work. It verifies that the bearer token provided to us by Google refers to an existing user and has not expired. The route then sends the request and response to the google_actions_app object.
Google sends requests to your server in a specific format and provides a library to help you parse and process those requests. Below are the functions needed to communicate with Google, but you can view the entire file here.
const { smarthome } = require('actions-on-google'); const mqtt = require('mqtt'); const mqtt_client = mqtt.connect(process.env.CLOUDMQTT_URL); const model = require('./model'); const { getTokenFromHeader } = require('./util'); mqtt_client.on('connect', () => { console.log('Connected to mqtt'); }); const updateHeight = { "preset one": (deviceId) => { mqtt_client.publish(`/esp32_iot_desk/${deviceId}/command`, "1"); }, "preset two": (deviceId) => { mqtt_client.publish(`/esp32_iot_desk/${deviceId}/command`, "2"); }, "preset three": (deviceId) => { mqtt_client.publish(`/esp32_iot_desk/${deviceId}/command`, "3"); }, }; const google_actions_app = smarthome({...}); google_actions_app.onSync(async (body, headers) => {...}); google_actions_app.onQuery(async (body, headers) => {...}); google_actions_app.onExecute(async (body, headers) => {...}); module.exports = { google_actions_app }; When you add a smart action to your Google account, Google will issue a sync request. This request allows you to find out which devices are available from your account. Next comes the polling request: Google queries your devices to determine their current state.
When you first add a Google activity to your Smart Home account, you'll notice that Google first sends a sync request and then a polling request to get a holistic view of your devices. The last one is a request that Google tells your devices to do something.
“Features” (trait) of the Google Smart Home device
Google uses device features to provide user interface elements for managing your Google devices and to create voice control communication patterns.
Some of the features include the following settings: ColorSetting, Modes, OnOff, and StartStop. It took me a while to decide which feature would work best in my application, but later I decided on the modes. You can think of modes as a drop-down list where you select one of N predefined values, or in my case, height presets. I named mine "height" and the possible values are "preset one", "preset two" and "preset three". This allows me to control my desk by saying, “Hey Google, set my desk height to preset one,” and Google will send the corresponding execution request to my system. You can read more about the features of Google devices here.
Models with height adjustment: a little about design features
Adjustable desks are very popular today. They are purchased for furnishing offices of companies, institutions and other organizations. You can buy a wide variety of models of such furniture in specialized online stores.
In addition to increased functionality, adjustable models are extremely reliable. Their supporting structures are most often made of durable alloys or steel. To increase their wear resistance, metal elements are chrome-plated or coated with a special paint. The rigidity of the structure is enhanced by special devices: screens or traverses.
The tabletop is usually made of laminated chipboard, much less often - from natural wood (due to its high cost). Its configuration can be different: rectangular (the most common option), square, round and even oval.
Project in action
Finally, Google Smart Home and my computer started communicating.
Previously, I used ngrok to run the Express server locally. Now that my server is finally working well enough, it's time to make it available to Google at any time. This meant hosting the application on Heroku, a PaaS provider that makes it easy to deploy and manage applications. One of the main advantages of Heroku is its add-ons mode. With add-ons, it's very easy to add CloudMQTT and a Postgres server to your application. Another advantage of using Heroku is that it is easy to build and deploy. Heroku automatically detects what code you are using and builds/deploys it for you. You can find more information about this by reading about Heroku Buildpacks. In my case, whenever I push code to Heroku's git remote, it installs all my packages, removes all development dependencies, and deploys the application, all with a simple "git push heroku main" command.
With just a few clicks, CloudMQTT and Postgres were available to my application, and I only needed to use a few environment variables to integrate these services with my application. Heroku did not demand money. However, CloudMQTT is a third-party add-on for $5 per month.
I believe the need for Postgres needs no comment, but CloudMQTT deserves more attention.
Existing varieties
Fundamentally, all such tables are the same: base, legs with height adjustment function and tabletop. Nevertheless, there are quite a lot of differences, some quite significant.
Convenience is achieved primarily by matching the parameters of furniture to the characteristics of a person’s physique. An adjustable table helps achieve this.
There are a number of criteria by which you can determine the type of table:
- Adjustment method. Mechanical or using an electric motor.
- Table top material. Glass, plastic, wood.
- Form. Rectangular, round, corner.
- Purpose. Children's, writing, computer, office.
- Options. Monitor mounts, cable management, remote control, sockets.
Additional Information! The simplest (and cheapest) is a table with manual height adjustment. The presence of an automatic lift will significantly increase the cost of the design, so you should carefully weigh everything before going to the store!
Externally, the transformer consists of an adjustable base and tabletops of various shapes, designs and colors.
From the Internet to a private network. The hard way
There are several ways to provide access to an application or, in my case, an Internet of Things device.
The first is to open a port on my home network to expose the device to the Internet. In this case, my Heroku Express application will send a request to my device using the public IP address. This would require me to have a public static IP as well as a static IP for the ESP32. The ESP32 would also have to act as an HTTP server and listen to instructions from Heroku all the time. This is a large overhead for a device that receives instructions several times a day. The second method is called "hole punch". With it, you can use a third-party external server to allow your device to access the Internet without the need for port forwarding. Your device basically connects to a server, which sets an open port. Another service can then connect directly to your internal device by receiving an open port from the external server. Finally, it connects directly to the device using this open port. The approach may or may not be entirely correct: I only read part of the article about it.
There's a lot going on inside the hole puncher, and I don't fully understand what's going on. However, if you're interested, there are some interesting articles that explain more. Here are two articles I read to better understand hole punching: Wikipedia and an MIT article written by Brian Ford and others.
From Internet to Private Network via IoT
I wasn't very happy with these decisions.
I've connected a lot of smart devices in the house and never had to open a port on the router, so there was no port forwarding. Also, hole punching seems much more complex than what I'm looking for and is better suited for P2P networks. Upon further research, I discovered MQTT and learned that it is a protocol for IoT. It has several advantages such as low power consumption, configurable fault tolerance, and does not require port forwarding. MQTT is a publisher/subscriber protocol, which means that the table is a subscriber to a certain topic, and the Heroku application is the publisher of this topic. So Google contacts Heroku, this request is analyzed to determine the requested device and its new state or mode. The Heroku app then publishes a message to the CloudMQTT server deployed as an add-on on Heroku, instructing the table to move to the new preset. Finally, the table subscribes to the topic and receives the message published by the Heroku app, finally the table adjusts its height as requested! In the googleactionsapp file, you will notice that there is an updateHeight function that publishes one number in the MQTT topic for a specific device ID. This is how the Heroku app publishes a request to move a table in MQTT.
The last step is to receive the message on the ESP32 and move the table. I'll show some highlights of the code for the table below, and all the source code is here.
void setup() { Serial.begin(115200);
… tfminis.begin(&Serial2); tfminis.setFrameRate(0); ... state_machine = new StateMachine(); state_machine->begin(*t_desk_height, UP_PWM_CHANNEL, DOWN_PWM_CHANNEL); setup_wifi(); client.setServer(MQTT_SERVER_DOMAIN, MQTT_SERVER_PORT); client.setCallback(callback); ... } When the table boots up, we first start communication between the TFMini-S - the distance sensor - to get the current height of the table. We then configure the state machine to move the table. The state machine receives commands via MQTT and is then responsible for matching the user's request with the actual table height read by the distance sensor. Finally, we connect to the Wi-Fi network, connect to the MQTT server, and set up a callback for any data received on the MQTT topic we are subscribed to. Below I will show the callback function. void callback(char *topic, byte *message, unsigned int length) { ... String messageTemp; for (int i = 0; i < length; i++) { messageTemp += (char)message ;
} if (messageTemp == "1") { state_machine->requestStateChange(ADJUST_TO_PRESET_1_HEIGHT_STATE); } if (messageTemp == "2") { state_machine->requestStateChange(ADJUST_TO_PRESET_2_HEIGHT_STATE); } if (messageTemp == "3") { state_machine->requestStateChange(ADJUST_TO_PRESET_3_HEIGHT_STATE); } ... } The state machine logs the state change received in the MQTT topic. It then processes the new state in the main loop. void loop() { if (!client.connected()) { reconnect(); } client.loop(); state_machine->processCurrentState(); } The main loop performs several tasks: first, it reconnects to the MQTT server if it is not already connected. Then it processes all data received through the MQTT topic. Finally, the code executes by moving the tabletop to the desired location requested in the MQTT topic. That's all! The table is fully voice controlled and communicates with Google to receive commands!
Latest notes
The last endpoint I didn't mention is the /healthz endpoint.
This is because Google expects a fairly quick response, and loading the Heroku app on every request doesn't work for me. I set up a ping service to ping the /healthz endpoint every minute to keep the service up and ready to respond. If you plan to do something like this, remember that it will use up all the free hours at the booth. Everything is fine now: this is the only application used on Heroku. Plus, for $7 a month, you can upgrade to Heroku's Hobby plan with always-on app support. Creating an IoT device involves a lot of overhead at the beginning. I designed the hardware, built the control circuit, configured the MQTT server, wrote an Express OAuth2 server, and learned how to interact with Google Smart Home through actions. The initial overhead was huge, but I feel like I've achieved a lot! Not to mention, the MQTT server, Express OAuth2 app server and Google Smart Home Actions can be used for another project. Smart homes are interesting to me, and I may try to expand my repertoire of IoT devices to include sensors that monitor what's happening around my home and report it via MQTT. Sensors for soil monitoring, temperature and light sensors will be very interesting to monitor and analyze.
Requirements for a homemade table
In production conditions, furniture is tested for compliance with the quality guarantee and recommended standards. When working independently, the master himself monitors the compliance of new furniture with safety requirements:
- Sufficient strength. Any furniture, even decorative, must withstand the slightest load. It is especially important to check the strength of fasteners and joints on dining and student tables.
- Environmental safety of the materials used. You should not build a table from materials containing harmful resins or toxic impurities. Also, such compositions cannot be used for decorative processing.
- Moisture resistant. If the table being manufactured is intended for eating and preparing dishes, care should be taken to ensure high-quality and timely impregnation of the surfaces with appropriate compounds.
- Mobility, compactness, possibility of transformation. The presence of such qualities will only play into the hands of owners of small apartments, houses, and summer cottages. After being used for its intended purpose, the folding table can be stored in the pantry.
Article on the topic: DIY electromagnetic table
In the process of independent work, it is important to strictly follow the prepared drawing and plan, because the quality and possible service life of the future product directly depend on this parameter.
What's next?
Countertop heights are now measured unreliably at best.
I use a generally working infrared distance sensor TFMini-S. It has been noticed that the height of the table changes slightly throughout the day as the ambient lighting in the room changes. I ordered a rotation angle sensor to count the rotations of the rod as it passes through the table. This should give me more precise movements at any time of the day. I also have access to a server that I host in the basement. On it I can explore my own Mosquitto MQTT server, Node-RED and Express OAuth2 applications if I want to host something myself. Finally, now all the electronics are right on my desk. I plan to organize the devices so that everything is nice and neat! Thank you for reading the article! For convenience, I provide all the links.
- Torque Calculator
- 90 degree right angle gear box
- BLE Terminal
- Platform.IO
- TFMini-S Arduino Driver
- Google Smart Home Actions
- Node OAuth2 Server
- Express OAuth2 Server
- ESP32 IoT Desk Server model.js
- ESP32 IoT Desk Server index.js
- ESP32 IoT Desk Server google_actions.js
- Google Smart Home Device Traits
- NGROK
- ESP32 IoT Desk Firmware
- Node-RED
- Heroku
- Heroku Hobby Plan
- Heroku Buildpacks
- Wikipedia Hole Punching
- MIT Paper on Hole Punching by Bryan Ford et al.
- C++ developer
More courses
- Data Science Profession Training
- Data Analyst training
- Profession Ethical hacker
- Frontend developer
- Profession Web developer
- Course "Python for Web Development"
- Advanced course “Machine Learning Pro + Deep Learning”
- Machine Learning Course
- Course "Mathematics and Machine Learning for Data Science"
- Unity game developer
- JavaScript Course
- Profession Java developer
- Data Analytics Course
- DevOps course
- Profession iOS developer from scratch
- Profession Android developer from scratch
Tags
I bought a table with an Ideal table for assembling a table and an interesting table if the table was adjusted to such a table and the choice of table influenced by adjusting the table you can and the table will rise 112 cm 118 cm time to change position View all View products View gallery View limited regular change of position 120 × 80 cm 160 × 80 cm with such table adjustment
buypricewareinformationcolorscomparisonsmanufacturersviewwidthratingbasketscabinetsergonomicusesfastdepthcabinethomesergostoldatasiteldspancustomerslengthspersonalbasketsuitabledetailmadxraceraddblacknumberofweeksdisadvantagesadvantagesseller