Любители электроники, люди интересующиеся робототехникой не упускают возможность самостоятельно сконструировать простого или сложного робота, насладиться самим процессом сборки и результатом.
Не всегда есть время и желание на уборку дома, но современные технологию позволяют создавать роботов уборщиков. К таковым можно отнести робота пылесоса, который ездит часами по комнатам и собирает пыль.
С чего начать если возникло желание создать робота своими руками? Конечно же первые роботы должны быть просты в создании. Робот, о котором пойдет речь в сегодняшней статье, не займет много времени и не требует особых навыков.
Продолжая тему создание роботов своими руками, предлагаю попробовать сделать танцующего робота из подручных средств. Для создания робота своими руками потребуются простые материалы, которые найдутся наверное практически в каждом доме.
Разнообразие роботов не ограничивается конкретными шаблонами, по которым эти роботы создаются. Людям постоянно приходят в голову оригинальные интересные идеи, как сделать робота. Одни создают статичные скульптуры роботов, другие создают динамичные скульптуры роботов, о чем и пойдет речь в сегодняшней статье.
Сделать робота своими руками может любой, даже ребенок. Робот, описание которого пойдет ниже, прост в создании и не требует много времени. Попробую привести описание этапов создания робота своими руками.
Порой идеи создания робота приходят совсем неожиданно. Если поразмышлять на тему, как заставить робота из подручных средств двигаться, возникает мысль о батарейках. Но, что если всё гораздо проще и доступнее? Давайте попробуем сделать робота своими руками используя мобильный телефон в качестве основной детали. Для создания вибро робота своими руками понадобятся следующие материалы.
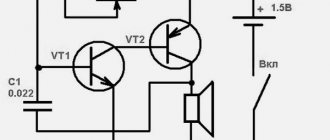
чтоб собрать жучка вам понадобится: — 2 маленьких моторчика 1.5вольт (можно купить или снять со старых игрушок (см. фото).) — 2 маленькие скрепки — 2 большие скрепки
2 батарейки AAA или AA
1 держатель для батареек AAA или AA (можно купить или снять с каких-нибудь игрушок)
1 2 cm изоляции
1 деревянный шарик (исп. в качестве колёсика) (можно использовать любой другой стабилизатор, например сняв колесо с какойнибудь старой или не нужной игрушки) — 1 метр эл. провода — 2 не больших SPDT переключателя (можно купить или снять например с старой компютерной мыши)
а также инструменты: *паяльник + немного олова *клейный пистолет и стержень клея к нему (клейный стержень можно расплавить просто паяльником, но рекоменд. это делать клейным пистолетом) *кусачки (чтоб снять изоляцию)
а вот и все детали
Сборка:
1. режим эл. провод на 13 кусочков по 6см и снимаем с них изоляцию (с двух сторон) по 1 см.
2. Припаеваем провода к каждому из компонентов (кроме батареек) см. рисунок.
припаеваем провод к бат. держателю (синий)(third connection)
3. Переверните держатель батареек и приклейте переключатели к нему «в форме V» (см. фото)
4. Приклейте 2 моторчика между переключателями так, чтобы сама ходовая часть моторчика касалась земли
5. Из большой скрепки и шарика делаем стабилизатор (колесо, чтоб проще передвигатся по поверхности)
6. соединение
вот так всё это должно смотрется
7. берем 2 мал. скрепочки и делаем из них усы для жука
8. осторожно приклеиваем усы к переключателям (используйте немного клея для этого, чтоб не заклеить сам переключатель)
9. наматываем немного изоляции на ходовую часть моторчика (для лучшего сцепления)
10. Вставляем батарейки
и готово!)
Это не очень сложно. Сам недавно делал!!!
Прикол в том, что когда он дотрагивается до препятствия правым усиком, то провое колесо останавливается и он поварачивает влево, и наоборот. (Объезжает препятствия)
Шагоходы из скрепок и моторчика – это не просто самодельные игрушки, но и целый арсенал технологических приемов и инженерного мышления.
Изготовление такого робота своими руками не только интересно, но развивает мелкую моторику пальцев, а для ребенка станет целым откровением – ведь фактически из ничего создается настоящий шагающий робот!
Чтобы собрать простого рабочего робота из обычных скрепок своими руками понадобится несколько незамысловатых и легкодоступных материалов. Во-первых это сами металлические скрепы, а также небольшой набор инструментов. Из инструментов понадобятся паяльник, припой, плоскогубцы, кусачки, круглогубцы, а также небольшой электрический двигатель с редуктором и батарейка к нему.
Для начала из длинной и толстой скрепки нужно сделать опорную раму, то есть согнуть ее в прямоугольник и надежно спаять ее концы припоем. На эту раму в процессе сборки будут устанавливаться детали и элементы робота.
Далее нужно изготовить петли, на которые будут крепиться ножки робота. Их нужно будет припаять к прямоугольной раме с помощью паяльника. Затем из скрепок изготавливаются маленькие ножки шагающего робота. При этом сначала желательно собрать сложные передние лапки, а потом все остальные.
После сборки конечностей робота нужно приступить к изготовлению коленчатого вала. Скрепа для него должна быть крепкой и абсолютно ровной.
Коленвал следует осторожно изготовить с помощью плоскогубцев и круглогубцев. Когда вал будет закончен, его следует аккуратно надеть на шестеренку двигателя. После этого изготавливаются специальные шатуны, которые соединят ножки робота с коленчатым валом. Затем шестеренка припаивается к коленвалу.
Затем на раму робота устанавливается батарейка и выключатель. Если все сделано верно робот начнет шагать.
Вот видеоинструкция по изготовлению самодельного шагающего робота из скрепок своими руками, смотрите ее, если вам что то не понятно из статьи.
Часть II. Суставы и связки.
Расскажите учащимся, что благодаря суставам наши конечности могут сгибаться, а благодаря связкам кости нашего скелета скрепляются между собой. А за счет чего в будет обеспечиваться подвижность деталей в роботе, части которого должны свободно изменять свое положение относительно друг друга?
Предложите командам найти следующие штифты в коробках своих робототехнических наборов.
Спросите учащихся, в чем отличаются штифты в каждой паре?
Попросите учащихся в командах соединить каждым штифтом по две балки и проверить вращение балок относительно друг друга. Балки, соединенные какими штифтами, вращаются более свободно? Сделайте заключение о том, какие штифты наиболее подходящие для подвижных соединений. Задайте вопрос, какие еще элементы из конструктора учащиеся могут предложить использовать в местах подвижных соединений помимо штифтов?
Часть III. Прототипирование ноги робота.
Пусть каждый из членов команд в своей тетради сделает схематический рисунок для шагающего робота или его части, которая ответственна за шагание. При создании схемы пусть они ориентируются только на детали из существующего комплекта. По завершению, учащиеся должны обговорить внутри команд свои схемы:
- Есть ли отличающиеся предложения по типу перемещения робота? По принципиальному строению педипулятора (pedis — нога, лат., понятие введено по аналогии с манипулятором)?
- Какую траекторию, по их мнению, описывают крайние точки получившихся педипуляторов относительно робота?
Обсудите получившиеся схемы. Могут ли учащиеся предложить еще варианты после обсуждения?
Пусть учащиеся соберут схему подобную следующей: Попросите привести шестерню в движение посредством оси и спросите, можно ли считать свободную балку, прикрепленную к шестерне прототипом ноги? Что произойдет если внизу под балкой подставить какую-то поверхность? Сможет ли робот опираться на такую ногу? Что не хватает такой конструкции?
Чтобы добавить такой конструкции «ноги» дополнительную жесткость измените механизм на: Отметьте, что у такой конструкции балка уже не болтается свободно — она закреплена сверху, что дает ей дополнительный упор. А за счет того, что балка закреплена теперь в двух местах, ее нижний конец теперь строго описывает определенную траекторию. Снова добавьте поверхность под нижний конец балки. Что происходит во время вращения шестерни?
Объясните, что мы будем считать эту конструкцию первым прототипом ноги. Теперь его нужно перенести на мотор. Прежде, чем это сделать попросите учащихся обозначить критические точки в конструкции, какие должны быть потом найдены у мотора. Если посмотреть на мотор, то у него места для крепления частей педипулятора тоже есть.
Теперь учащиеся должны будут перенести всю конструкцию, необходимую для создания педипулятора, на мотор. Работа должна проходить в парах — каждая пара делает педипулятор на одном моторе. В итоге получится вот такой результат:
Попросите учащихся подключить мотор к контроллеру и на блоке написать программу для движения одного мотора в течении нескольких секунд.
Перенос прототипа на мотор робота удался!
После наблюдения за системой, пусть учащиеся построят в тетради схему этой механической системы, а также проставят размеры. Если какие-то размеры должны быть вычислены, то учащиеся должны расписать процесс вычисления данных величин.
Сейчас уже мало кто помнит, к сожалению, что в 2005 году были Chemical Brothers и у них был замечательный клип — Believe, где роботизированная рука гонялась по городу за героем видео.
Тогда у меня появилась мечта. Несбыточная на тот момент, т. к. ни малейшего понятия об электронике у меня не было. Но мне хотелось верить — believe. Прошло 10 лет, и буквально вчера мне удалось впервые собрать своего собственного робота-манипулятора, запустить его в работу, затем сломать, починить, и снова запустить в работу, а попутно найти друзей и обрести уверенность в собственных силах.
Внимание, под катом спойлеры!
Всё началось с (привет, Мастер Кит, и спасибо, что разрешили написать в вашем блоге!), который был почти сразу найден и выбран после этой статьи на Хабре. На сайте говорится, что собрать робота — под силу даже 8-летнему ребёнку — чем я хуже? Я точно так же только пробую свои силы.
Сначала была паранойя
Как истинный параноик, сразу выскажу опасения, которые у меня изначально были относительно конструктора. В моём детстве сперва были добротные советские конструкторы, потом рассыпающиеся в руках китайские игрушки… а потом детство кончилось:(
Поэтому из того, что осталось в памяти об игрушках, было:
- Пластмасса будет ломаться и крошиться в руках?
- Детали будут неплотно подходить друг к другу?
- В наборе будут не все детали?
- Собранная конструкция будет непрочной и недолговечной?
И, наконец, урок, который был вынесен из советских конструкторов:
- Часть деталей придётся допиливать напильником
- А части деталей просто не будет в наборе
- И ещё часть будет изначально не работать, её придётся менять
Что я могу сказать сейчас: не зря в моем любимом клипе Believe главный герой видит страхи там, где их нет. Ни одно из опасений не оправдалось
: деталей было ровно столько, сколько нужно, все они подходили друг к другу, на мой взгляд — идеально, что очень сильно поднимало настроение по ходу работы.
Детали конструктора не только отлично подходят друг к другу, но также продуман тот момент, что детали почти что невозможно перепутать
. Правда, с немецкой педантичностью создатели
отложили винтиков ровно столько сколько нужно
, поэтому терять винтики по полу или путать «какой куда» при сборке робота нежелательно.
Технические характеристики:
Длина:
228 мм
Высота:
380 мм
Ширина:
160 мм
Вес в сборке:
658 гр.
Питание:
4 батарейки типа D
Вес поднимаемых предметов:
до 100 гр
Подсветка:
1 светодиод
Тип управления:
проводной дистанционный пульт
Примерное время сборки:
6 часов
Движение:
5 коллекторных моторов
Защита конструкции при движении:
храповик
Подвижность:
Механизм захвата:
0-1,77″»
Движение запястья:
в пределах 120 градусов
Движение локтя:
в пределах 300 градусов
Движение плеча:
в пределах 180 градусов
Вращение на платформе:
в пределах 270 градусов
Вам понадобятся:
- удлинённые плоскогубцы (не получится обойтись без них)
- боковые кусачки (можно заменить на нож для бумаги, ножницы)
- крестовая отвёртка
- 4 батарейки типа D
Полный список компонентов
Обязательные компоненты
| Тип компонента | Модель компонента | Стоимость |
| Микроконтроллер | Teensy 3.2 | 19.80 |
| Двигатель | Tamiya 70168 | 9.25 |
| Драйвер двигателя | DRV8835 | 4.49 |
| Шаровая опора | Tamiya 70144 | 5.99 |
| Датчик отражателя | QTR-3RC | 4.95 |
| Колеса | Tamiya 70101 | 4.10 |
| Датчик расстояния | Pololu 38kHz | 5.95 |
| Печатная плата | Elecro 10x10cm | 14.00 |
| Держатель батарей | Держатель батарей 2-AA | 0.79 |
| Общая стоимость без доставки | $49.52 | |
Дополнительные компоненты
| Тип компонента | Модель компонента | Стоимость |
| Беспроводной модуль | nRF51 Dongle | 52.39 |
| Разъемы | Штырьковые разъемы | 5.00 |
Важно! О мелких деталях
Кстати о «винтиках». Если вы сталкивались с подобной проблемой, и знаете, как сделать сборку ещё удобнее — добро пожаловать в комментарии. Пока что поделюсь своим опытом.
Одинаковые по функции, но разные по длине болты и шурупы достаточно чётко прописаны в инструкции, например, на средней фото внизу мы видим болты P11 и P13. А может P14 — ну, то есть, вот опять, я снова их путаю. =)
Различить их можно: в инструкции прописано, какой из них сколько миллиметров. Но, во-первых, не будешь же сидеть со штангенциркулем (особенно если тебе 8 лет и\или у тебя его попросту нет), а, во-вторых, различить их в итоге можно только, если положить рядом, что может не сразу прийти на ум (мне не пришло, хе-хе).
Поэтому заранее предупрежу, если надумаете собирать этого или похожего робота сами, вот вам подсказка:
- либо заранее присмотритесь к крепёжным элементам;
- либо купите себе побольше мелких винтов, саморезов и болтов, чтобы не париться.
Также, ни в коем случае не выбрасывайте ничего, пока не закончите сборку. На нижней фотографии в середине, между двумя деталями от корпуса «головы» робота — небольшое кольцо, которое чуть не полетело в мусор вместе с прочими «обрезками». А это, между прочим, держатель для светодиодного фонарика в «голове» механизма захвата.
Взаимодействие: датчики
Для следования за линией и следования за стенами требуются разные датчики. Датчики для следования за линией – это обычно рефлектометры, которые изменяют выдаваемое напряжение в зависимости от того, сколько света отражается от земли. Это делается с помощью светодиода и фотодиода или датчика освещенности. Детекторы стен и препятствий – это обычно датчики расстояния. Оба типа этих датчиков были доступны в удобных DIP корпусах в том же магазине, что и двигатели, что позволило мне сэкономить на доставке и легко их припаивать. По поводу датчика линии, я нашел датчик с тремя сенсорами, которые позволяют роботу в любое время центрироваться относительно линии. По поводу датчика расстояния, я решил использовать инфракрасный датчик высокой яркости, так как в данном проекте я имел дело более низким напряжением, чем ожидалось.
Процесс сборки
К роботу прилагается инструкция без лишних слов — только изображения и чётко каталогизированные и промаркированные детали.
Детали достаточно удобно откусываются и зачистки не требуют, но мне понравилась идея каждую деталь обработать ножом для картона и ножницами, хотя это и не обязательно.
Сборка начинается с четырёх из пяти входящих в конструкцию моторов, собирать которые настоящее удовольствие: я просто обожаю шестерёночные механизмы.
Моторчики мы обнаружили аккуратно упакованными и «прилипшими» друг к другу — готовьтесь ответить на вопрос ребёнка, почему коллекторные моторчики магнитятся (можно сразу в комментариях! 
Важно:
в 3 из 5 корпусов моторчиков нужно
утопить гайки по бокам
— на них в дальнейшем мы посадим корпуса при сборке руки. Боковые гайки не нужны только в моторчике, который пойдёт в основу платформы, но чтобы потом не вспоминать, какой корпус куда, лучше утопите гайки в каждом из четырёх жёлтых корпусов сразу. Только для этой операции будут нужны плоскогубцы, в дальнейшем они не понадобятся.
Примерно через 30-40 минут каждый из 4х моторов оказался снабжён своим шестереночным механизмом и корпусом. Собирается всё не сложнее, чем в детстве собирался «Киндер-сюрприз», только гораздо интереснее. Вопрос на внимательность по фото выше:
три из четырёх выходных шестерёнок черные, а где белая? Из её корпуса должны выходить синий и чёрный провод. В инструкции это всё есть, но, думаю, обратить на это внимание ещё раз стоит.
После того, как у вас на руках оказались все моторы, кроме «головного», вы приступите к сборке платформы, на которой будет стоять наш робот. Именно на этом этапе ко мне пришло понимание, что с шурупами и винтами надо было поступать более вдумчиво: как видно на фото выше, двух винтов для скрепления моторчиков вместе за счет боковых гаек мне не хватило — они уже были где-то мною же вкручены в глубине уже собранной платформы. Пришлось импровизировать.
Когда платформа и основная часть руки собраны, инструкция предложит вам перейти к сбору механизма захвата, где полно мелких деталей и подвижных частей — самое интересное!
Но, надо сказать, что на этом спойлеры закончатся и начнутся видео, так как мне нужно было ехать на встречу с подругой и робота, которого не удалось успеть закончить, пришлось захватить с собой.
Нюансы педагогики
Все, что было описано выше, я делал в свободное время по вечерам. В неспешном режиме я потратил на робота где-то недели три. На этом можно было бы и завершиться, но я еще обещал вам рассказать о работе с ребенком. Что выполнимо в таком возрасте?
Работа по инструкции
Каждую деталь мы сначала проверяли отдельно — светодиоды, пищалка, моторы, датчики и т. д. Есть большое количество готовых примеров — какие-то прямо в среде разработки, другие можно найти в интернете. Это, несомненно, радует. Берем код, подключаем деталь, убеждаемся, что работает, далее уже начинаем изменять под свою задачу. Подключения по схеме и под некоторым моим контролем ребенок делает сам. Это хорошо. Работать четко по инструкции тоже надо уметь.
Порядок работы («от частного к общему»)
Вот это сложный пункт. Нужно приучать, что большой проект («сделать робота») состоит из мелких задач («подключить датчик», «подключить моторы»…), а те, в свою очередь, из еще более мелких шагов («найти программу», «подключить плату», «загрузить прошивку»…). Выполняя более-менее понятные задачи нижнего уровня, мы «закрываем» задачи среднего уровня, а из них уже складывается общий результат. Объяснял, но, думаю, осознание придет еще не скоро. Где-то, наверное, к подростковому возрасту.
Монтаж
Сверление, резьбы, винты, гайки, пайка и запах канифоли — куда же без этого. Ребенок получил базовый скилл «Работа с паяльником» — удалось спаять несколько соединений (я чуть-чуть помогал, не скрою). Не забывайте про объяснение техники безопасности.
Работа на компьютере
Программу для робота писал я, но каких-то попутных результатов все-таки удалось достичь.
Первое: английский. В школе его только-только начали, поэтому мы «со скрипом» разбирали, что такое pishalka, migalka, yarkost и прочий транслит. Поняли хотя бы это. Я осознанно не стал использовать родные английские слова, так как до этого уровня мы еще не дошли.
Второе: эффективная работа. Учили горячие комбинации клавиш, как быстро выполнять типовые операции. Периодически, когда писали программу, мы менялись с сыном местами, и я говорил, что нужно сделать (замену, поиск и т.д.). Приходилось повторять снова и снова: «выдели двойным кликом», «зажми Shift», «зажми Ctrl» и так далее. Процесс обучения здесь не быстрый, но, я думаю, навыки постепенно отложатся «в подкорку».
Скрытый текст
Вы можете сказать, что описанное выше — это почти очевидно. Но, честно, этой осенью мне довелось вести информатику в 9-х классах в одной школе. Это ужас. Ученики не знают таких элементарных вещей, как Ctrl + Z, Ctrl + C и Ctrl + V, выделения текста с зажатым Shift-ом или двойным кликом на слове и прочего. Это при том, что у них шел третий год обучения информатике… Вывод сделайте сами. Третье: слепая печать. Комментарии в коде я доверил печатать ребенку (пусть тренируется). Сразу поставили правильно руки, чтобы пальцы постепенно запоминали расположение клавиш.
Как видите, у нас все еще только-только начинается. Навыки и знания будем оттачивать и дальше, в жизни пригодятся.
Кстати, про перспективу…
Как стать душой компании при помощи робота
Легко! Когда мы продолжили сборку вместе, стало понятно: собирать робота самостоятельно — очень
приятно. Работать над конструкцией вместе — приятно вдвойне. Поэтому смело могу рекомендовать этот набор для тех, кто не хочет сидеть в кафе за скучными разговорами, но хочет повидаться с друзьями и хорошо провести время. Более того, мне кажется, и тимбилдинг с таким набором — например, сборка двумя командами, на скорость — практически беспроигрышный вариант.
Робот ожил в наших руках сразу, как только мы закончили сборку. Передать вам наш восторг, я, к сожалению, не могу словами, но, думаю, многие меня здесь поймут. Когда конструкция, которую ты сам собрал вдруг начинает жить полноценной жизнью — это кайф!
Мы поняли, что жутко проголодались и пошли поесть. Идти было недалеко, поэтому робота мы донесли в руках. И тут нас ждал ещё один приятный сюрприз: робототехника не только увлекательна. Она ещё и сближает. Как только мы сели за столик, нас окружили люди, которые хотели познакомиться с роботом и собрать себе такого же. Больше всего ребятам понравилось здороваться с роботом «за щупальца», потому что ведёт он себя действительно как живой, да и в первую очередь это же рука! Словом, основные принципы аниматроники были освоены пользователями интуитивно
. Вот как это выглядело:
Работа схемы
Схема самобалансирующегося робота на основе платы Arduino UNO представлена на следующем рисунке.
Как видите, схема достаточно проста и в ней вам всего лишь необходимо подключить гироскоп MPU6050 и драйвер мотора к плате Arduino, а также соединить двигатели с драйвером мотора. Схема запитывается от литий-ионной батареи на 7.4V.
Плата Arduino и модуль драйвер мотора L298N непосредственно запитываются через контакты Vin и 12V соответственно. Встроенный в плату Arduino регулятор напряжения преобразует входное напряжение 7.4V в напряжение 5V, с помощью которого и запитывается микроконтроллер ATmega на плате и гироскоп MPU6050. Электродвигатели постоянного тока могут запитываться от напряжения от 5V до 12V, в нашем случае они будут работать от напряжения 7.4V.
Распиновка подключения контактов гироскопа MPU6050 представлена в следующей таблице.
| MPU6050 | контакт Arduino |
| Vcc | +5V |
| Ground | Gnd |
| SCL | A5 |
| SDA | A4 |
| INT | D2 |
Распиновка подключения контактов драйвера мотора L298N представлена в следующей таблице.
| L298N | контакт Arduino |
| IN1 | D6 |
| IN2 | D9 |
| IN3 | D10 |
| IN4 | D11 |
Гироскоп MPU6050 взаимодействует с платой Arduino через интерфейс I2C, поэтому для его подключения мы использовали SPI контакты A4 и A5 платы Arduino. Двигатели постоянного тока управляются с помощью ШИМ (широтно-импульсная модуляция) контактов D6, D9, D10 и D11. ШИМ сигнал в данном случае необходим для управления скоростью вращения двигателей.
Troubleshooting
По возвращении домой меня ждал неприятный сюрприз, и хорошо, что он случился до публикации этого обзора, потому что теперь мы сразу обговорим troubleshooting.
Решив попробовать подвигать рукой по максимальной амплитуде, удалось добиться характерного треска и отказа функциональности механизма мотора в локте. Сначала это меня огорчило: ну вот, новая игрушка, только собрана — и уже больше не работает.
Но потом меня осенило: если ты сам её только что собрал, за чем же дело стало? =) Я же прекрасно знаю набор шестерёнок внутри корпуса, а чтобы понять, сломался ли сам мотор, или просто недостаточно хорошо был закреплён корпус, можно не вынимая моторчика из платы дать ему нагрузку и посмотреть, продолжатся ли щелчки.
Вот тут-то мне и удалось почувствовать себя настоящим
робо-мастером!
Аккуратно разобрав «локтевой сустав», удалось определить, что без нагрузки моторчик работает бесперебойно. Разошёлся корпус, внутрь выпал один из шурупов (потому что его примагнитил моторчик), и если бы мы продолжили эксплуатацию, то шестерёнки были бы повреждены — в разобранном виде на них была обнаружена характерная «пудра» из стёршейся пластмассы.
Очень удобно, что робота не пришлось разбирать целиком. И классно на самом деле, что поломка произошла из-за не совсем аккуратной сборки в этом месте, а не из-за каких-то заводских трудностей: их в моём наборе вообще обнаружено не было.
Совет:
первое время после сборки держите отвёртку и плоскогубцы под рукой — могут пригодиться.
Создание каркаса
Нет никакого «идеального» способа создания каркаса. Почти всегда требуется компромисс. Возможно, вам нужен легкий каркас. Но может потребоваться использование дорогостоящих материалов или слишком хрупких материалов.
Вы можете захотеть сделать надежное или большое шасси. Хоты вы понимаете, что это будет дорого, тяжело или сложно в производстве. Ваш «идеальный» каркас или рама может быть очень сложным.Изготовление каркаса робота может потребовать слишком много времени для разработки и создания.
При этом простой каркас может быть не менее хорошим. Идеальная форма встречается редко, но некоторые проекты могут выглядеть более элегантно из-за своей простоты. Возможно другие проекты могут привлечь внимание из-за их сложности.
Что можно воспитать благодаря данному набору?
Уверенность в себе!
Мало того, что у меня нашлись общие темы для общения с совершенно незнакомыми людьми, но мне также удалось самостоятельно не только собрать, но и починить игрушку! А значит, я могу не сомневаться: с моим роботом всегда всё будет ок. И это очень приятное чувство, когда речь идёт о любимых вещах.
Мы живём в мире, где мы страшно зависим от продавцов, поставщиков, сотрудников сервиса и наличия свободного времени и денег. Если ты почти ничего не умеешь делать, тебе за всё придётся платить, и скорее всего — переплачивать. Возможность починить игрушку самому, потому что ты знаешь, как у неё устроен каждый узел — это бесценно. Пусть у ребёнка такая уверенность в себе будет.
Программа управления
Расписывать детально код я смысла не вижу, кому нужно — ссылка в конце статьи, там всё достаточно читабельно. А вот общую структуру было бы неплохо объяснить.
Первое, что пришлось осмыслить: робот — это устройство реального времени. Точнее, вспомнить, потому что и раньше, и сейчас все равно занимаюсь электроникой. Значит, сразу забываем про вызов delay()
, который очень любят использовать в скетчах-примерах, и который просто «замораживает» программу на указанный промежуток времени. Вместо этого, как советуют опытные люди, вводим таймеры на каждый блок. Прошел требуемый промежуток — выполнили действие (увеличили яркость светодиода, включили двигатель и так далее).
Таймеры могут быть взаимосвязаны. Так, например, пищалка работает синхронно с мигалкой. Это чуть упрощает программу.
Естественно, всё разбиваем на отдельные функции (мигалка, звук, поворот, движение вперед и так далее). Если так не делать, то потом уже не разобраться, что откуда и куда.
Итоги
Что понравилось:
- Собранный по инструкции робот не потребовал отладки, запустился сразу
- Детали почти невозможно перепутать
- Строгая каталогизация и наличие деталей
- Инструкция, которую не надо читать (только изображения)
- Отсутствие значимых люфтов и зазоров в конструкциях
- Лёгкость сборки
- Лёгкость профилактики и починки
- Last but not least: свою игрушку собираешь сам, за тебя не трудятся филиппинские дети
Что нужно ещё:
- Ещё крепёжных элементов, прозапас
- Детали и запчасти к нему, чтобы можно было заменить при необходимости
- Ещё роботов, разных и сложных
- Идеи, что можно улучшить\приделать\убрать — словом, на сборке игра не заканчивается! Очень хочется, чтобы она продолжалась!
Вердикт:
Собирать робота из этого конструктора — не сложнее, чем паззл или «Киндер-сюрприз», только результат гораздо масштабнее и вызываЛ бурю эмоций у нас и окружающих. Отличный набор, спасибо,
Мозги: микроконтроллер
Существует несколько различных микроконтроллерных платформ, которые довольно популярны. Основываясь на популярности, очевидным выбором является какая-либо Arduino. Другие варианты: Teensy, Launchpad и Raspberry Pi. Pi слишком большой и прожорливый, Launchpad тоже слишком большой. В прошлом я использовал Teensy, и это был хороший опыт. Teensy немного дороже, чем Arduino Mini, но предлагает гораздо более мощную платформу. Последняя плата Teensy снабжена Cortex M4, который обладает достаточной мощностью для простого робота. Бонусом к Teensy является встроенный стабилизатор на 500 мА, который может быть использован для питания всех датчиков.
Мастерим робота Валли из бумаги
Для того чтобы склеить робота Валли, вам сперва понадобится распечатать схемы деталей из которых он состоит. Распечатывать лучше на цветном принтере, тогда робот будет красивее и эффектнее. Бумагу лучше используйте плотную, хорошо подойдет тонкий картон. Если подобной бумаги у вас нет, тогда распечатайте детали на обычной офисной формата А-4, а затем наклейте ее на картон.
Когда детали распечатаны, приступайте к их вырезанию. Для этого используйте маленькие ножницы или канцелярский нож.
На последнем этапе остается всего лишь склеить все детали. Для этого лучше использовать клей-карандаш, это позволит произвести склеивание более аккуратно.
Дальнейшее развитие
Робот сделан, ездит, мигает и пищит. Что же теперь? Воодушевившись достигнутым, мы планируем дорабатывать его дальше. Есть задумка сделать дистанционное управление — по типу лунохода. Было бы интересно, сидя за условным пультом, контролировать движение робота, который ездит совсем в другом месте. Но это уже будет отдельная история…
И в конце, собственно, герои этой статьи (видео по клику):
Спасибо за внимание!
→ Ссылка на код