Роботы заменяют людей на производстве и в быту, трудятся в опасных условиях. Андроиды, напоминающие человека, работают, как правило, в качестве промоутеров, а промышленные машины настроены на точное выполнение функций. Их разработкой занимаются специалисты.
Домашних же мастеров интересует вопрос, как сделать робота из подручных средств. Оригинальные механизмы можно сконструировать самостоятельно и запрограммировать на реализацию несложных задач.
Более легкие варианты
Для сильно занятых родителей нужна поделка для создания которой не потребуется много времени и материала. С минимумом материальных затрат, но которую не стыдно будет показать. Желательно чтобы простая поделка робот в детский сад выглядела как серьезная работа созданная с самоотдачей.
Можно взять обычный упаковочный картон, для этого подойдет любая коробка и сделать из нее крупную поделку.
Руки и ноги прикрепляются отдельно, посредством сцепления пазлов, это необходимо для того чтобы изделие имело объем, а не плоскую форму. После останется лишь раскрасить макет гуашью и получиться весьма оригинальный робот.
Из бутылок и скотча
Если предыдущая конструкция показалась вам слишком сложной в изготовлении, можете обойтись методикой попроще. Три 1,5-литровых пластиковых бутылки стяните скотчем, не снимая пробок – это тело робота. К каждой крайней бутылке пробкой к пробке скотчем присоедините еще по одно такой же бутылке – получились ноги.
Разрежьте следующую бутылку пополам, и ту половинку, которая без пробки, примотайте скотчем в средней бутылке – это голова. Голову украсьте двумя пробками – глазами.
Руки можно сделать из поллитровых бутылок, нарезав их сегментами и соединив между собой.
Еще из двух бутылок вырежьте ладони и присоедините их к рукам. Поделка готова!
Еще один интересный вариант
Коробочку для яиц можно превратить в настоящий шедевр. Для создания композиции лучше взять две, разного размера. Одна будет основанием туловища, а вторая головой робота.
Рекомендуем прочитать:
Поделка снегирь: подробное описание как сделать птицу своими руками (115 фото)Поделки из овощей: 100 фото лучших поделок для детей и обзор рецептов для взрослых
- Поделка корабль: 120 фото, шаблоны, чертежи и пошаговая инструкция как сделать кораблик
Чтобы окрасить поделку равномерно используйте поролоновую губку и разбавьте гуашь водой, краска ляжет ровно и не будет подтеков. Промокните кассету для яиц тщательно, чтобы ни осталось не прокрашенных щелей.
Геометрическая аппликация своими руками
И маленьким детям под силу справиться с заданием, делая весёлую аппликацию с рисунком робота, пользуясь геометрическими фигурами.
Предварительно следует сделать необходимые формы фигур на бумаге и вырезать их. Это могут быть различные по форме треугольники, круги или квадраты.
С помощью клеевого карандаша на бумажный лист приклеиваем вырезанные фигуры, делая детскую поделку робот. Маркером рисуем мелкие элементы и разукрашиваем фон.
Такая творческая деятельность научит детей различать цвета и формы, к тому же занятие способствует развитию мелкой моторики.
Делаем красиво
- Обернем коробки белой бумагой, чтобы скрыть все ненужное. Впрочем, фон можно выбрать самостоятельно: серый, зеленый, синий будут смотреть еще эффектней.
- Из цветной бумаги другого оттенка вырезаем глаза и прочие мелкие элементы.
- Для создания рук и ног подойдут рулончики от туалетной бумаги. Чтобы они не сломались, заполняем их газетой. С ее же помощью прикрепить отдельные элементы к друг другу будет очень легко.
- Голова крепиться с помощью клея.
Робот из пластиковых бутылок
Делать робота можно и из самого простого материала – пластиковых бутылок. Для поделки приготовьте:
- непрозрачную бутылку из-под колы;
- игрушечное ведерко из набора детской посуды;
- две вилки;
- три крышечки от пластиковых бутылок;
- два колеса от игрушечного автомобиля, соединенные шасси.
Снизу по бокам бутылки проделываем два отверстия, в которые продеваем шасси и прикручиваем колесики. Сгибаем две вилки – это руки – и крепим к туловищу сзади на болты. На голову надеваем ведерко, к которому прикрепляем две крышечки побольше – это глаза, и одну поменьше посередине – это рот. Украшаем робота, как подскажет фантазия.
Еще один вариант
Делать типичные модификации не всегда предпочтительно. Можно разнообразить работу, создать робота используя дополнительные материалы. Глазки сделать из пенопластового шарика, разрезав его пополам, все остальное – это бумага, картон и краски.
Не обязательно делать его в полный рост, ручки и ножки могут быть мягкими, так робот будет представлен в сидячем положении.
Полезные роботизированные устройства для начинающих
Первые шаги в робототехнике можно начать:
- со знакомства с наборами для конструирования и программирования Lego BOOST (7-12 лет) и Lego EV3 (с 10 лет);
- с конструирования вибророботов, предназначенных для детских игр;
- с занятий с использованием электронных конструкторов «Знаток»;
- со сборки простых конструкторов для начинающих на основе Arduino;
- с конструирования моделей, представленных обучающими конструкторами Engino.
Мягкий экземпляр
Не менее интересная модель может быть сконструирована из фетра:
- Туловище основание – 5 см;
- Голова робота – 4 см;
- Ножки – 2,5 см;
- Ручки – 2 см.
Для создания каждого квадратика необходимо заготовить шесть раскладок.
- Сшиваются в произвольной форме. Крупные стежки придадут эффектности.
- Готовые детали набиваются наполнителем, после они приклеиваются или пришиваются.
- Выбирая цвет материала можно обозначить пол, дополнительные элементы тоже возможны. Мальчику – роботу можно прикрепить галстук или бабочку, а для девочки подойдет элегантный бантик.
- Глазки – пуговички.
Робот, различающий препятствия
Перед сборкой интеллектуального устройства обдумывают его внешний вид и принцип передвижения. Оптимальный вариант – использование гусеничной цепи (как в танке).
Такими роботами легче управлять, и они способны передвигаться по любому типу поверхности. Снять гусеницы, моторчик и редуктор можно с игрушечного танка.
Инструменты и запчасти
Перед созданием робота следует подготовить:
- микроконтроллер (ATmega 16 в корпусе Dip-40);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- резисторы на 25 Вт номиналом 10 кОм (1 единицу) и 220 Ом (4 штуки);
- диод 1N4004;
- L7805 в корпусе ТО-220;
- паяльник;
- инфракрасные диоды (2 шт.);
- фототранзисторы, способные реагировать на длину ик-лучей;
- резонатор кварцевый на 16 МГц;
- мультиметр;
- радиодетали;
- гусеницы и мотор от игрушечного экскаватора, танка.
Работа с платой
Для обеспечения питания микроконтроллера подбирают стабилизатор напряжения. Оптимальный выбор – микросхема L7805, дающая на выходе стабильные 5 В. Дополнением к ней идут конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:
- вывод Reset, подтянутый резистором к «плюсу» источника питания;
- электролит на 1000 мкФ для защиты от скачков напряжения;
- кварцевый резонатор и конденсаторы, которые нужно располагать вблизи от выводов Xtal1 и Xtal2.
Управление двигателями
В приспособлении используется микросхема L293D со встроенными диодами, которые защищают систему от перегрузки. Она имеет 2 канала, что позволяет подключить сразу 2 двигателя. Моторчики на плате запрещено присоединять напрямую к МК. Контакт обеспечивается с помощью ключевых транзисторов.
Во время работы возможен нагрев микроэлектронного устройства. Для отведения тепла предусмотрены ножки GND, которые следует распаивать на контактной площадке.
Установка датчиков препятствий
Ориентирование робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать в инфракрасном диапазоне, и фототранзистора для приема лучей. В отсутствии преграды перед механизмом транзистор закрыт.
При его приближении к мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует течение тока по цепи и побуждает устройство изменять траекторию движения.
Датчики устанавливают на передней части платы, подключая их с помощью проводов к основной схеме. По бокам от основы располагают гусеничный механизм.
Прошивка робота
Для работы устройства требуется программа, которая позволит снимать показания с датчиков и управлять двигателями. Простым роботам ее пишут с использованием языка программирования Си. Он представляет собой набор функций, вызывающих друг друга для дополнения.
Прописывая команды, следует учесть, что по инструкции у робота 2 датчика. Если на 1 из фототранзисторов поступает свет от инфракрасного диода, механизм начинает движение назад, отъезжая от препятствия. Он разворачивается и снова едет вперед.
Наличие преград следует проверять справа и слева, что прописывается с помощью команд. Алгоритм работы можно усовершенствовать, задав командную строку, что делать при возникновении угрозы прямого столкновения.
Улучшить готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информативности в дальнейшем устанавливается дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другие нужные сведения.
Из спичечных коробков
Оригинальность идеи состоит в том, что робот может быть трансформером. Количество коробков не ограничено, на все воля фантазии.
- Коробки, согласно предпочтениям, обклеивают цветной бумагой
- Детали соединяются между собой скрепками или для надежности, с помощью клея.
Поделка робот своими руками занимательное и креативное занятие для детей всех возрастов.
Робот из крышечек
Довольно интересным получится робот из пластиковых крышечек. Благодаря резинке, скрепляющей все элементы, у него будут двигаться руки и ноги. Предлагаем подробный мастер-класс изготовления трансформера из 22 крышечек:
- Для каждой ноги понадобится по 4 крышечки. В первых двух делаем отверстие горячим шилом посередине, в третьей – в донышке, но ближе к краю, а в четвертой проделываем сразу два отверстия – в центре и сбоку.
- В резинку с одной стороны вдеваем иголку, а с другой затягиваем плотный узел.
- Продеваем две крышки с центральным отверстием, затем идет крышка со сдвинутым центром и крышка с дырой в боковине. Завязываем резинку на узел.
- По этой же схеме собираем вторую ногу.
- Для изготовления руки проделываем в трех крышечках отверстия по центру, а в четвертой – сбоку.
- Вначале протягиваем иголку с резинкой в крышечку с боковым отверстием, затем поочередно – с центральными. Затягиваем резинку на узелок.
- Для головы нам понадобится одна крышечка и один колпачок от тюбика из-под зубной пасты. Для туловища – пять крышечек. В двух из них делаем отверстия по центру, в двух других – по два симметричных отверстия по бокам, а в пятой – сразу три отверстия по центру и по бокам.
- Стягиваем резинкой крышечку-голову, колпачок от зубной пасты и крышечку с тремя отверстиями. За ними идет крышечка с двумя отверстиями и крышечка с одни отверстием. Две оставшиеся крышечки – плечи – продеваем резинкой в боковые отверстия на туловище.
- В крайних крышечках рук проделываем по одному боковому отверстию. Пропускаем резинку сквозь него, затем через плечо и крышечку с тремя отверстиями. Далее – вторая крышка плеча и крайняя крышка второй руки.
- Через боковое отверстие в ноге пропускаем резинку, далее она проходит сквозь боковые отверстия нижней крышечки туловища, сквозь боковое отверстие во второй ноге и стягивается.
В принципе, наш робот-трансформер готов. Осталось только добавить ему глаза. Можно сделать отверстия в крышечке-голове, аппликацию или приделать их из пластилина. Роботу понадобится гранатомет. Для этого прекрасно подойдет колпачок от шариковой ручки. Его можно прикрепить к руке, поместить за спину или поставить на плечо.
Фото поделки робот
0
2
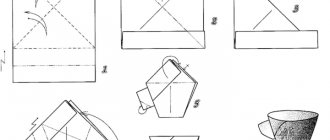
Порядок работы
- Объедините вместе три бутылки, склеив их скотчем.
- Затем возьмите ещё три бутылки и скрепите их аналогичным образом. Объедините вместе эти заготовки, и у вас получится туловище робота квадратной формы.
- Теперь изготавливайте голову – для этого вам подойдёт бутылка, разрезанная пополам.
- Возьмите нижнюю часть. Приклеивайте её к основной конструкции при помощи клеевого пистолета или скотча.
- Настало время изготовить ноги робота, от них будет зависеть, насколько устойчивой получится поделка. Одна нога – это две пластиковые бутылки, скреплённые скотчем.
- Используйте клеевой пистолет либо скотч, чтобы прикрепить ноги к роботу.
- Для того, чтобы изготовить руку, берите фрагмент бутылки, кисть руки вырезайте из кусочка пластика.
- Другой кусок пластика, побольше, сверните в трубку и закрепите при помощи скотча. Прикрепляйте руки к роботу также при помощи скотча либо клея.
- Переходите к декорированию поделки. Глазами робота могут служить крышечки от бутылок. Рот можете нарисовать маркерами.
Можете добавлять другие детали, всё зависит только от вашей фантазии.
Инструкция по сборке робота-автомобиля
В этой статье расскажем вам о том, как по шагам собрать универсального робота на колесной или гусеничной платформе. Управлять им будет микроконтроллер Ардуино нано. Если вам не нравится долго читать, посмотрите в конце статьи на видео, подготовленное нашими партнерами – каналом ArduMast Club.
Пример платформы робота-машины на Ардуино
Предлагаем инструкцию по созданию универсальной платформы, которая потом пригодится для создания самых разных проектов, независимо от выбранного контролера или типа шасси. Вы можете использовать стандартные варианты из Алиэкспресса, как на видео, можете снабдить машину гусеницами и создать вездеход, можете придумать вообще ни на что не похожий вариант. Главное, чтобы число двигателей не превышало 4 и сами ни не были слишком мощными (тогда придется менять тип управления моторами – другой драйвер двигателя).
Робот на Ардуино
Для реализации проекта нам понадобится:
- Контроллер Ардуино (в нашем случае, Arduino Nano).
- Драйвер двигателя L298N.
- Двигатели с редукторами.
- Корпус и шасси для крепления колес и оборудования
- Корпус для аккумуляторов 18650 с выключателем.
- Коммутационные провода.
Дополнительное оборудование, которое потребуется для создания полноценного проекта:
- Датчик расстояния и серво-мотор, на который он установлен.
- Инфракрасные датчики линии.
- Светодиоды для индикации и “красоты”.
- Пьезодинамик – пищалка.
- Bluetooth модуль (если собираетесь управлять машинкой дистанционно).
- Sensor shield (упрощает коммутацию).
- Модуль контроля заряда и подзарядки аккумуляторов.
- Сами аккумуляторы.
Общая схема машинки на Ардуино
Схема электропитания робота автомобиля
Вопрос организации правильного стабильного электропитания является одним из самых важных в любом проекте.В нашей модели применена рекомендованная нами схема питания, основанная на использовании литийионных аккумуляторов формата 18650 и платы защиты их от переразряда и перезаряда.
Давайте разберем самый простой вариант схемы питания электромоторов. Перед началом сборки лучше заранее припаять провода к моторам.
Схема питания и подключения двигателей в ардуино автомобиле
Все достаточно стандартно и вы найдете в интернете десятки подобных примеров. Но в этой схеме есть большой минус – в случае полного разряда аккумуляторы придут в негодность.
Машинка на Ардуино
Для добавления контроллера разряда придется внести следующие изменения в схему:
Схема питания с контролем разряда аккумулятора
Теперь аккумуляторы будут защищены, но здесь нет возможности заряжать их.
Питание робота Ардуино
Для зарядки можно использовать модуль повышения напряжения с 5v до необходимого уровня зарядки, который зависит от количества серий используемых аккумуляторов. Он имеет гнездо типа микро USB и при частом использовании оно может сломаться, поэтому мы рекомендуем установить дополнительное гнездо для последующей подзарядки пяти вольтовым блоком питания. Для зарядки двух литий-ионных аккумуляторов необходимо настроить выходное напряжение на 8,4 Вольта.
Схема питания с модулем зарядки для ардуино робота машинки
Подключаем двигатели и плату
С питанием платформы мы разобрались, теперь подключим остальные компоненты. Для начала припаиваем провода к моторам, затем обматываем их изолентой, чтобы случайно в дальнейшем не оторвать контакты. Можно сделать так, что в итоге на 2 двигателя будут идти всего два провода вместо 4х. Это немного упростит монтаж и сэкономит место на платформе.
Монтируем драйвер двигателей на платформу так, чтобы его радиатор был спереди. ЭТО ВАЖНО! В противном случае, вам придется переписывать программу для микроконтроллера.
Драйвер двигателя для Ардуино робота
Затем размещаем холдер и плату БМС. Не забываем оставлять место спереди для последующего монтажа каких-либо сенсоров. Ардуиио нужно разместить так, чтобы была в дальнейшем возможность подключить его к ПК для прошивки. Это же правило относится и к модулю для зарядки аккумуляторов.
Питание для ардуино и других электронных компонентов мы возьмем от драйвера двигателей.
Подключаем Bluetooth к машинке
Мы собираемся использовать модуль Bluetooth через SoftwareSerial (библиотеку SoftwareSerial.h), поэтому подключаем модуль блютуз к 3 и 4 цифровым пинам ардуино. RX к D3, TX к D4
Схема подключения Bluetooth к ардуино машинке Подключаем Bluetooth
Схема подключения драйвера двигателя к роботу
Схема подключения компонентов к Arduino Датчик расстояния машины
Платформа робота готова! Теперь осталось загрузить прошивку для контроллера Ардуино и программу для смартфона RC CAR. Вы можете посмотреть на нашем сайте обзор Android приложений для работы с Arduino.
Где купить платформу и запчасти
Все, о чем говорится в этой статье, можно без проблем купить на всем известном сайте. К сожалению, подавляющее большинство предложений основываются на стандартной платформе 4WD автомобиля с двумя несущими планками, не очень надежными двигателями и колесами, любящими ездить в “развалочку”. Но эти варианты относительно не дороги и вполне подойдут для начала работы.
Платформа Ардуино 4WD с двигателями, колесами и рамой без электронных компонентов
4WD платформа для Ардуино с необычным видом крепления элементов
Конструктор машинки Ардуино на платформе 4WD с пультом управления Bluetooth и PS2
Типовой набор 4WD машинки с Ардуино, шилдами и основными датчиками
Из жестяных банок
Поделка робот для детей всегда является желанной игрушкой. Можно сделать несколько разных фигурок. Тара из-под газированного напитка станет отличной заготовкой. Из такой банки можно сделать любого робота.
Интересным вариантом станет создание фигурки в виде насекомого. Этот фантастический персонаж займет достойное место в коллекции игрушек непоседы.
Если поделку дополнить небольшим моторчиком, то она сможет двигаться. Такое изделие не под силу ребенку, потребуется помощь папы или дедушки.
Домашний робот шпион
В последнее время можно встретить немало различных устройств, позволяющих проводить исследование местности через дистанционно управляемую видеокамеру.
Вы уже знакомы с летающими квадрокоптерами с камерой на борту, которые в режиме онлайн (при установке нужного модуля) передают изображение на ноутбук оператора, а сегодня мы рассмотрим небольшого ездящего робота-шпиона, предназначенного для охраны помещений.
Комплект поставки содержит зарядное устройство-станцию, сетевой адаптер, аккумуляторы, шнуры и кабеля, а также самого робота.
Этот робот перемещается с помощью 3-х колёс, причём делать это может в любом направлении, так как используются специальные колёса-валики, которые вращаются и вокруг оси и вдоль оси. Сейчас такие колёса используют в современных складских помещениях — на погрузчиках электрокарах.
Данное устройство не просто игрушка, но также и полезная штука.
Робота шпиона можно использовать для удаленного наблюдения за помещением находящимся в любой точке мира, управляя его передвижением и выполняя видео, аудио и фото съемку через интернет, используя беспроводную Wi-Fi связь с роботом. Естественно видео можно записывать в видео файл. Управление роботом производится через компьютер, используя специальную программу.
Домашний робот шпион может ездить во всех направлениях, менять положение камеры по высоте, включать подсветку, издавать звуки, включать специальные режимы (например, снимать фото при срабатывании датчика движения). Зарядка робота осуществляется автоматически или командой дистанционно через Wi-Fi, от специальной станции, которая проецирует на потолок инфракрасные метки, по которым робот находит зарядную станцию.
Он может патрулировать ваш дом, используя предопределенные маршруты, которые вы настраиваете с удобным программным обеспечением, основанным на простом интерфейсе.
В данной модели используется технология Northstar — это система, которая создает micro-GPS навигацию в вашем доме, позволяя роботу шпиону знать строение вашего дома с точностью до миллиметра. Даже если ребенок или домашнее животное сбивают его с курса, робот сразу это поймет и вернется на исходный маршрут.
Вы можете задать ему маршрут вдоль которого он должен патрулировать и спокойно ехать по делам — робот будет следить за вашим домом, периодически подъезжая к зарядному устройству для восполнения энергии. Стыковка с контактами происходит автоматически.