Автономную работу всевозможных устройств,отмобильных гаджетов до персонального электротранспорта, обеспечивают аккумуляторы. С учетом необходимых значений емкости и напряжения, они объединяются в аккумуляторные батареи. Ключевые характеристики АКБ – емкость, напряжение, масса, время восполнения заряда, допустимый температурный режим – зависят от типа используемой химии.
Для автономного питания современной техники успешно используются литий-ионные аккумуляторы. Они имеют большой циклический ресурс, малый саморазряд, широкий температурный диапазон и солидную удельную емкость. Катод у таких элементов выполнен из производных лития, а заряд переносят ионы Li. Далее мы подробнее рассмотрим устройство Li-ion аккумуляторов и принцип их работы.
Как устроена литий-ионная батарея?
В основе конструкции литий-ионного аккумулятора– 2 составляющие: анод, выполненный из пористого углерода на фольге из меди, и катод – из оксида лития на фольге из алюминия. Их разделяет пористый сепаратор из полипропилена, обильно пропитанный электролитом, который выполняет функции проводника. Система находится в герметичном корпусе. Электроды подключены к токосъемникам. Некоторые аккумуляторы дополнительно имеют клапан-предохранитель для сброса внутреннего давления.
Пластины из меди и алюминия, смазанные электролитом и разделенные пористой прослойкой, обычно сворачиваются в рулон. В итоге получается элемент цилиндрической формы. При другом способе укладки пластин получаются изделия в форме призм и пакетов. Состав катода бывает разным: LiMn2O4, LiFePO4, LiCoO2,LiMnO2, LiMnRON, LiC6, LiNiO2и т.д.
Изготовление самого простого варианта сканера
Одно из самых простых решений для самодельного создания ЧПУ станка – использование деталей от другого оборудования, снабженного шаровыми двигателями. Функцию отлично выполняют старые принтеры.
Берем следующие детали, извлеченные из прежних приборов:
- Сама микросхема.
- Шаговый двигатель.
- Пара стальных прутков.
При создании корпуса контроллера надо взять и старую картонную коробку. Допустимо использовать коробки из фанеры или текстолита, исходный материал не имеет значения. Но картон проще всего обработать, используя обычные ножницы.
Типы Li-ionаккумуляторов
В зависимости от используемого материала катода литиевые элементы бывают:
- Литий-марганцевые (LiMn2O4, LNO). Имеют меньшее внутреннее сопротивление, высокую мощность и умеренную емкость – 100–150 Вт·ч/кг. Стандартные токи заряда и разряда – до 1С, но есть модели с С-рейтингом зарядки до 3С и С-рейтингом разряда до 10С, а в импульсном режиме – до 50С. Ресурс – около 500 циклов. Применяются такие накопители в электроинструменте, силовых агрегатах, медицинском оборудовании.
- Литий-кобальтовые (LiCoO2, LCO). Имеют высокую энергоемкость (150–200 Вт·ч/кг), но уступают аналогам по термической стабильности и сроку службы (500–1000 циклов). Токи заряда и разряда для таких элементов не должны превышать 1С. Накопители энергии на основе кобальта встречаются все реже, но еще используются в мобильных телефонах, цифровых камерах, ноутбуках.
- Литий-никель-марганец-кобальт-оксидные (NMC, NCM). Обеспечивают высокую мощность и емкость – 150–220 Вт·ч/кг, выдерживают 1000–2000 циклов. Стандартные токи заряда и разряда – 1С. Используются в медицинском и промышленном оборудовании, электровелосипедах и других видах электротранспорта.
- Литий-никель-кобальт-алюминий-оксидные (NCA). Отличаются высокой удельной энергоемкостью – 200–260 Вт·ч/кг. Имеют ресурс около 500 циклов, зарядные токи 0,7С и разрядные 1С. Обеспечивают автономное питание промышленного и медицинского оборудования, электрических силовых агрегатов и других устройств, требующих высокой емкости.
- Литий-железо-фосфатные (LFP, LiFePO4). Отличаются большим ресурсом (более 2000 циклов), термической и химической стабильностью, высокой безопасностью эксплуатации и малым внутренним сопротивлением. Их удельная энергоемкость составляет 90–120 Вт·ч/кг, ток зарядки – 1С, ток разрядки – до 25С. Используются такие элементы питания в устройствах, для которых важна выносливость аккумов, способность работать на морозе и выдерживать высокие токи нагрузки.
- Литий-титанатные (LiTi). Отличаются низким номинальным напряжением (2,4 В) и удельной энергоемкостью 70–80 Вт·ч/кг, но быстро заряжаются, имеют широкий температурный диапазон и ресурс 3000–7000 циклов. Номинальные токи зарядки 1С, максимум – 5С. Допустимые разрядные токи – 10С, а при импульсной подзарядке – 30С. Литий-титанатные элементы считаются самыми безопасными. Используются они в уличном освещении, ИБП, электротранспорте.
Двигатель и контроллер для электросамоката своими руками
В этой статье я расскажу как в домашних условиях сделать мощный двигатель для самоката или детского электромобиля с высоким КПД и простой контроллер к нему.
UPD 28.06.2020 ——————————>
Вот что в итоге получилось: двигатель описанный в статье ниже без изменений, добавил регулируемый источник питания и курок газа, маленькая батарея в сумочке на руле 8S1P 2,5 А·ч (быстро заменяемая, можно брать несколько с собой, одной такой батареи хватает на 9-12км на средней скорости)
Расход батареи зависит от скорости, прилагаю таблицу расхода энергии для моего веса 85 кг:
Контроллер сейчас полный мост 4 транзистора IRFB4110 установленных без радиаторов, регулируемый источник питания выдает на этот мост напряжение от 25 до 70В при 24-33В на входе с кпд более 93%. Общий кпд системы получился на уровне 80-85% (включая потери на батарее проводах контроллере и двигателе).
<———————— UPD 28.06.2020
Первое что вас шокирует это то, что в этом двигателе не будет железа. Не нужно нарезать пластины статора или ротора на лазерном оборудовании, собирать в пакеты и подгонять всю конструкцию к микронной точности. Это обычно мешает обычным людям создавать самим двигатели. Вы удивитесь насколько проста конструкция и не поверите полученным от нее характеристикам.
Обычно вбивая в поиск на ютубе например «электродвигатель своими руками» вы видите катушку и магнит и это вращается и все знают, что да это работает, но кпд там ничтожный и нормальную тягу создать не может. Но, все ошибаются, на самом деле используя правильно катушку и магнит можно сделать мощный двигатель с высоким кпд.
С чего все начиналось. Когда-то просматривая патенты на двигатели я обратил внимание на двигатель из катушки внутри которой вращался длинный магнитный стержень закрепленный на валу, такая конструкция не приобрела распространение по причине низкого кпд из за слабых магнитов которые были в то время и немного неправильной конструкции. Забегая наперед скажу какой должна быть идеальная конструкция двигателя — магнит сферической формы закрепленный на оси полюсами перпендикулярно оси вокруг него располагается круглая катушка квадратного сечения (через нее проходит ось поэтому можно ее разделить на 2 части и разместить ближе к оси) — все — конструкция готова, остается закрепить все в корпусе и получится двухтактный двигатель. Правда найти такой магнит в продаже мне еще не удавалось но если все начнут делать такие двигатели то скоро появятся.
Сейчас в продаже есть магниты цилиндры диаметрально намагниченные с отверстием по оси, они почти идеально подходят (лучше на сейчас нету), стоят они в общем не дешево но все равно дешевле готовых двигателей раза в 2-5, самые крупные внутри катушки с током (15А 100-200 витков) руками не провернуть уже (за магнит не за ось, а за ось и плоскогубцами не провернуть). Первое опасение мое было когда я запускал такой двигатель на самокате — было, не порвет ли он случайно зубчатый ремень при старте. То-есть понимаете что это уже не те игрушечные двигатели с катушкой и магнитом что вы видите на ютубе.
Теперь о КПД, оказалось все очень просто и предсказуемо, когда магнит цилиндр (сфера) повернут полюсами к виткам катушки то сила магнитного поля действует на магнит по касательной то-есть перпендикулярно к радиусу создавая максимальный вращательный момент а когда он повернут полюсами по оси катушки то момент равен нулю а это означает что в таком положении если подать на катушку ток он весь 100% пойдет в нагрев и кпд вращения = 0%, а когда он повернут полюсами к катушке то кпд максимум и зависит от установившегося тока при определенной нагрузке. Например если в этой точке при напряжении питания 10в установился ток 1А то полное сопротивление (активное + реактивное) = 10 Ом и если при этом сопротивление самой обмотки 1 Ом то кпд в той точке 90% (ну и соответственно если сопротивление обмотки 0,1 Ом то кпд 99%). Вывод — обмотка должна быть с как можно меньшим сопротивлением и запитывать ее нужно в тех точках где кпд максимальный их однозначно нельзя запитывать когда магнит повернут вдоль оси или почти вдоль оси так как это 90-100% потери (нагрев). И в этом можно убедится если собрать простой драйвер на 2х ключах (схема в конце статьи) и подать управление от микросхемы с почти любого куллера с 4мы выводами (контроллер управления куллером с встроенным датчиком холла и 2мя выходами которые обычно подключают напрямую к обмоткам). КПД будет на уровне 55% (максимум 72,2% минус потери на сопротивлении зависит от нагрузки на двигатель). Вы уже наверно поняли как нужно повышать КПД, сокращать угол запитки со 180 град до 90 — 45 — 30 — 15, чем меньше тем кпд ближе к 100% но снижается тяга. Где разумный предел, получается при 180 угле потребляем 100 вт отдаем в нагрузку 50-70 вт, если сократить угол до 90 то потребляем 50 вт а отдаем в нагрузку 37 — 44 — (максимум 89,97% — потери) кпд выше но отдаваемая мощность ниже при том же напряжении питания, 120 град (будет аналогично 3хфазному теоретический максимум 86% — потери на активном сопротивлении). Нужен двигатель с большой равномерной тягой и кпд 95%? Запросто — берете 6 магнитов на одну ось со смещением угла катушек или магнитов по 30град получаем 6ти фазный 12 тактный двигатель (аналог 12 цилиндровому двс) с кпд до 97.2% который также можно перепрограммировать на любой другой угол фазы и жертвуя кпд поднимать тягу еще в 2-3 раза при необходимости.
Эскиз ниже показывает конструкцию двигателя и размещение датчиков холла (в примере датчики холла разведены от середины катушки на угол 45 градусов что дает 90 градусов угол запитки обмоток, когда полюса магнита находятся максимально близко к виткам катушки)
Мой двигатель однофазный двухтактный с углом запитки 110 град выдал кпд 87% на скорости 13 км/ч с нагрузкой 92 кг по ровной дороге при этом обмотки заклеенные в закрытом деревянном корпусе за час непрерывной езды нагрелись аж до 41 градуса при среднем потреблении двигателя 88 Вт. Две обмотки по 125 витков в параллель проводом диаметром 0,83 мм, магнит 65 диаметром, 30 высота, внутренний 18 мм ссылка. В сумме меди 260 грамм из расчета на 260 Вт. Мой вес 85 кг (самокат 8кг с двигателем и батареей, легче только из карбона), питание 10х Samsung INR18650-25R = 87 Вт/час (42В максимум с отводом от середины, 2.5 А/ч) мне полного заряда хватает на ~15 км по ровной дороге.
Изначально использовался 1 датчик холла (но я уже тогда знал что это большие потери так как делал такие двигатели и раньше), так двигатель на холостом ходу потреблял 42 Вт (1 А на каждую половину батареи, итого 2*21 или 1*42) и за 2 минуты нагревался до 50 градусов (это без нагрузки), установка 2х датчиков холла снизила ток холостого хода в 10 раз! и он составил 100 мА (4,2 Вт) и греться он перестал. На максимальной нагрузке (езда в горку) ток достигал 6 ампер (>250 Вт) и обмотка разогревалась так что больше пары минут нельзя было ездить а после установки 2х датчиков холла и подачи питания на обмотки только в нужные моменты, согласно рисунку выше, полностью решило проблему перегрева (значительно подняло кпд) и ток при заезде на ту же горку упал в 2 раза (130 Вт)
И так магниты с катушками запакованы в корпус, вал (болт М6 100мм на котором гайками с бортиком, зажимные для колес, через шайбу и резиновую прокладку зафиксирован магнит) закреплен в немагнитных стальных подшипниках (это в идеале, но я использовал обычные дешевые стальные но сила магнитного поля такая что крутятся они с трудом, поэтому лучше сразу нержавейку ставить) и самое главное как его теперь запустить. Я использовал самый простой вариант одна катушка и один магнит — самый дешевый вариант и для самоката подходит идеально, естественно так как запитываем только 90 — 120 градусов сектор на такт то остается незаполненные тягой сектора и стартовать такой двигатель будет с толчка, но это же не вентилятор а двигатель для самоката, оттолкнулся, включил двигатель и поехал, все просто. Если же нужен автопуск то минимум нужно делать 2х фазный 4х тактный, такой поставил в детском автомобиле.
Контроллер
Фраза «шим регуляция» у меня ассоциируется с потерями, запитывать нужно постоянным током чтобы избежать потерь переключения на ключах и не греть диоды в ключах, в общем контроллер может работать с кпд 97% и выше если забыть про шим, а скорость лучше регулировать напряжением питания (например у меня в самокате она фиксированная 13 — 18 км/ч в зависимости от веса ездока). Запитка обмотки двумя тактами возможна или мостом но тогда потери всегда на 2х ключах или полумостом с питанием с отводом от средней точки, выбран именно такой вариант так как в 2 раза уменьшает потери на ключах (всегда катушка включена только через 1 ключ). Еще из плюсов такого полумоста то что обратная эдс при отключении катушки сливается через 1 диод в противоположное плечо и потери на диодах тоже в 2 раза меньше то-есть больше энергии вернется в конденсатор / аккумулятор так же и с рекуперации от скатывания с горки. В итоге получаем полумост + драйвер полумоста + схема управления.
Схема управления
Использование одного датчика хола не дает возможность управлять углом в котором запитывается обмотка, поэтому нужно минимум 2 датчика расположенные таким образом чтоб получать включение обмоток в нужном диапазоне, проще всего сделать угол 90 град (для этого нужно разнести датчики на 45 градусов от витков катушки в обе стороны) тогда пары датчиков хватит на 4 такта (используем только 2 из них для однофазного) . Каждый датчик возвращает 2 позиции которые означают видит ли он северный или южный полюс, так вот когда оба видят северный включаем один ключ, когда оба видят южный второй, при использовании микросхем от куллера — реализуется логикой 2или-не, на входы двух логических элементов подается питание через сопротивления на выходах при этом 0, микросхемы куллера коммутируют входы логических элементов на ноль, когда оба входа на нуле на выходе 1 — включается 1 ключ, и так же когда на втором логическом элементе оба входа на нуле включается другой ключ. Все просто. Учитывайте при выборе микросхемы драйвера куллера (датчик холла) что они есть с защитой от остановки и без, для двигателя поддержки как у меня на самокате лучше использовать с защитой он запустится только при начале езды, но для двигателя который должен стартовать сам нужно выбирать без защиты и делать ее если необходима другим способом (защита от перегрузки по току например).
Микросхем логики у меня не было потому заменил транзисторами. Схема подключения драйвера мосфетов по даташиту.
Отладка двигателя
Хочу отметить важные моменты которые уберегут детали контроллера от случайного выжигания. Дело в том что обратная эдс с катушки очень коварная штука, она может спалить всю электронику и драйвер и микросхемы с датчиком холла. Для предотвращения таких ситуаций обязательно должны стоять конденсаторы по входу питания в которые сливается обратная эдс с катушки (через защитные диоды в мосфетах) при случайном отключении батареи, минимум 1000 мкф 50В с низким esr. Также для предотвращения попадания выбросов высокого напряжения на выход драйвера через обратную емкость мосфета, обязательно в цепи затвор исток должен стоять стабилитрон на 13-15В (что ниже допустимого напряжения затвора 20В но выше управляющего напряжения с драйвера 12В).
При первом включении обмотку лучше подключать через сопротивление ограничивающее максимальный ток (10-50 Ом), переворотом датчиков холла добиваемся вращения в нужную сторону. Также перемещая датчики можно найти позиции где потребление на холостом ходу будет минимальным и работа двигателя тихой. Сильно уменьшать угол запитки не стоит (< 90 град) для двухтактного двигателя, хоть потребление будет и ниже на холостом но создать достаточную тягу будет сложнее так как в меньшие промежутки времени придется вложить больше мощности а это дополнительные потери на контролере и батарее.
Цена
- болт (вал), гайки и шайбы (фиксация магнита и подшипников), немагнитные шурупы (нержавейка, для скручивания корпуса) < 2$
- корпус (брус 1,5м х 80 х 20) = 1,3$
- зубчатые колеса и ремень = 8$
- магнит = 50$
- платы и все детали < 10$
- 10х Samsung INR18650-25R = 38$
Итого, электрификация самоката обошлась в ~110$
Плюсы и минусы
Плюсы:
- двигатель вращается без какого либо сопротивления, что не мешает поездке на самокате как на обычном при отключенном питании
- малый вес
- цена
- высокая эффективность
Минусы:
- нельзя устанавливать такой двигатель вблизи магнитных материалов (приведет к залипанию ротора, использование в корпусе железных болтов тоже недопустимо, только нержавейка или клей)
- нельзя устанавливать очень близко с массивными токопроводящими материалами (торможение вихревыми токами, идеально использовать раму из пластика, дерева, карбона тогда можно ставить где угодно)
- придумайте и напишите в комментариях (низкая скорость не катит, можно поднять напряжение, меня устраивает скорость для езды по пешеходным дорожкам)
Больше фото
Прижатие ремня для большего сцепления с зубчатым колесом
Первые включения (еще с 1 датчиком холла и пониженным напряжением питания 2х8В) максимальная скорость 3-5 км/ч
Настройка положения датчиков (катаемся, меряем потребление, переклеиваем датчик холла ищем оптимальный вариант) на фото оптимальный
Как работает литиевый аккумулятор?
Принцип работы Li-ion аккумуляторов идентичен для элементов всех типов, независимо от материала катода.Когда на электроды подается напряжение – «плюс» на оксид лития и «минус» на графит – положительно заряженные ионы лития отцепляются от молекул оксида и переходят на углеродную пластинку. В результате протекает окислительная реакция, и аккумулятор заряжается.
При работе литиевого аккумулятора под нагрузкой протекает обратный процесс. Ионы Li+возвращаются на пластинку из оксида лития, в свое стандартное состояние. Графитовая пластинка на фольге из меди становится «минусом», а оксид лития на фольге из алюминия – «плюсом».
Выводы и полезное видео по теме
Желание сделать оборудование для домашнего применения своими руками иногда сильнее более простого решения — покупки недорогого устройства. Что из этого получилось, смотрите в видеоролике:
Оценивая перспективы изготовления электроники собственными силами независимо от её назначения, приходится столкнуться с мыслью, что век «самоделкиных» завершается.
Рынок перенасыщен готовыми электронными устройствами и модульными комплектующими практически под каждый бытовой продукт. Электронщикам-любителям теперь остаётся единственное дело – заниматься сборкой домашних конструкторов.
Есть, что дополнить, или возникли вопросы по теме сборки и использования контроллеров для ветрогенератора? Можете оставлять комментарии, задавать вопросы и добавлять фотографии своих самоделок — форма для связи находится в нижнем блоке.
Особенности зарядкиLi-ionэлементов
Литий-ионные элементы питания чувствительны к перезаряду. На поверхности анода при чрезмерном заряде осаждается металлический литий. Он выглядит как мелкий мшистый осадок и способен вступать в реакцию с электролитом. На катоде при перезаряде активно выделяется кислород. Внешне это может проявляться в виде интенсивного нагрева, роста давления и разгерметизации элемента.
Заряжаются Li-ionаккумуляторы в 2 этапа:
- При стабильном значении тока 0,2С–1С до рекомендованного производителем напряжения, обычно – 4,1–4,2 В. Длится эта стадия около 40 минут.
- При неизменном напряжении. Процесс зарядки завершается, когда значение зарядного тока уменьшается до величины, составляющей 3% от начального значения.
Быстрее происходит зарядка в импульсном режиме.Но для продления срока службы литиевых элементов их рекомендуется заряжать током, номинал которого составляет 50% от значения емкости, т.е. 0,5С.
Используем Turbo CNC – программу для управления
ПО Turbo CNC точно будет работать с микроконтроллером, который использует микросхему ULN2003.
- Используем специализированный сайт, откуда можно скачать программное оборудование.
- Любой пользователь разберется в том, как провести установку.
- Именно данная программа лучше всего работает под MS-DOS. В режиме совместимости на Windows могут появляться некоторые ошибки.
- Но, с другой стороны, это позволит собрать компьютер с определенными характеристиками, совместимыми именно с данным программным обеспечением.
Защита литиевых аккумуляторов
Элементы питания на основе лития защищены от коротких замыканийвнутри системы, например, с помощью 2-слойного сепаратора. Один из его слоев выполняется не из полипропилена, а из аналога полиэтилена. При риске короткого замыкания, к примеру, если дендриты лития прорастают к катоду, защитный слой локально нагревается, частично плавится, становится непроницаемым и блокирует последующее прорастание дендритов.
Для защиты от избыточного заряда и глубокого разряда накопители энергии снабжаются специальными ограничителями – платами защиты по току и напряжению. Они не допускают выхода напряжения за границы рекомендованного диапазона и в критических ситуациях автоматически отключают элемент от питания или нагрузки.
Поэтому для безопасной работы элементов и аккумуляторных батарей важно использовать BMSплаты. В противном случае высок риск повреждения аккумуляторов и их преждевременного выхода из строя. Такой контроллер зарядно-разрядного процесса может устанавливаться и на отдельные аккумуляторы, и на собранную из них батарею.
Будет ли стоить игра свеч?
Если же рассмотреть все с точки зрения логики простого человека, который не увлечен радиотехникой, то, естественно, приобрести дешевый контроллер будет не дороже. Кроме того, не будет потеряно время на создание своими руками. Но для истинного радиолюбителя, а иногда и просто человека увлеченного, собрать такое устройство самостоятельно куда приятнее, чем покупать где-то в магазине. А вот попробовать сделать контроллер собственноручно все же стоит, потому что удовольствие от проделанной работы (и к тому же удачной) ничто не сможет заменить.
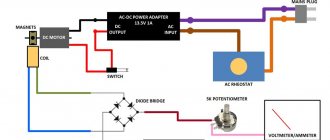
Про ШИМ регулятор
ШИМ (PWM) регулятор широкого применения – устройство, разработанное для плавного включения, выключения и регулировки мощности, оборотов, яркости и другого.
Ранее для регулировки оборотов электродвигателей изменяли питающее напряжение. Однако в современной электротехнике от этого отказались. Теперь регулировка происходит путём подачи на электромотор импульсов тока, которые имеют разную длительность. Что и делают ШИМ (широтно-импульсно модулируемые) регуляторы, которые в последнее время становятся всё более и более популярными.
Схемы ШИМ контроллеров универсальны – подойдут и для регулировки яркости ламп, и для регулировки скорости оборотов мотора да хоть для регулирования силы тока в зарядном устройстве.
Сфера применения ШИМ регуляторов очень велика.
Обзор на плату
Собранная плата самодельного ШИМ регулятора:
Источник prom.st
Управление платы ручное и осуществляется переменным резистором или внешним напряжением в диапазонах:
0,45 В – устройство выключено, коэффициент заполнения – 0%
0,5/3,5 В – плавное регулирование, коэффициент заполнения от 0,1% до 99,9%
3,6 В – устройство включено, коэффициент заполнения – 100%
Устройство работает при постоянном напряжении от 10 до 28 Вольт.
Максимальное напряжение ограничено максимально допустимым напряжением силовых ключей, а также обратным напряжением мощного диода в нагрузке, при отдельном от дополнительного источника питания управления на 15 В.
Советую при напряжение не доходящим до 15 Вольт не устанавливать стабилизатор.
Вместо него лучше подойдёт какой-нибудь диод или обычная перемычка.
Если же напряжение от 15 до 28 Вольт, то стоит установить линейный (например, 7815) или импульсный стабилизатор в виде готового модуля на MP2307, при этом необходимо выставить на нём напряжение 15 Вольт.
Заказать их можно на всё том же Алиэкспрессе.
При необходимости вы можете регулировать частоту плавно переменным резистором.
Для этого нужно подключить его на плату вместо перемычки.
Литература
1. Чигарев М. Микросхемы управления зарядом аккумуляторов компании ON Semiconductor//Новости Электроники, № 3, 2010.
2. Никитин А. Интегральные схемы управления зарядом аккумуляторов производства Maxim//Новости электроники, № 15, 2009.
3. Хрусталев Д.А. Аккумуляторы. — М.: Изумруд, 2003.
4. L6924U. USB compatible battery charger system with integrated power switch for Li-Ion/Li-Polymer//Материал компании STMicroelectronics. Размещение в Интернете: Ссылка
5. Camiolo Jean, Scuderi Giuseppe. Reducing the Total No-Load Power Consumption of Battery Chargers and Adapter Applications Polymer//Материал компании STMicroelectronics. Размещение в Интернете: Ссылка
6. Maximum power point tracker. Статья в Википедии. Страница в Интернете: https://en.wikipedia.org/wiki/Maximum_power_point_tracker
7. STEVAL-ISV012V1: lithium-ion solar battery charger//Материал компании STMicroelectronics. Размещение в Интернете: Ссылка.
Получение технической информации, заказ образцов, поставка — e-mail
•••
Общий принцип сборки для любого зарядного для 18650
В первую очередь надо изготовить плату. Ее можно разработать самостоятельно (в программах типа Sprint LayOut), можно найти готовую в интернете. Дальше два пути:
- Изготовить плату методом ЛУТ или по другой домашней технологии.
- Заказать плату в Китае.
Во втором варианте плата будет заведомо качественнее, но обойдется дороже, да и подождать придется не один день.
При сборке зарядки для аккумуляторов типоразмера 18650 на специализированных микросхемах, надо иметь в виду, что их корпуса зачастую сверхминиатюрны, и для пайки таких элементов нужны отдельные навыки.
Маркировка
Все параметры литий ионной батареи можно узнать из маркировки, нанесенной на корпус. Вариант маркировки может отличаться у каждого вида АКБ. Пока не существует единого стандарта маркирования. Но достаточно просто разобраться в ней, зная типовые параметры и обозначения:
- Буквы. Первой буквой всегда стоит I, так как обозначает тип технологии, т.е. литий ионную. Вторая буква дает уточнение по составу, встречаются маркировки такие как M, F, C, N. Третья буква дает обозначение того, что батарея является перезаряжаемой, маркировка R.
- Цифры. Цифровая маркировка означает размеры в миллиметрах. Таким образом первые 2 цифры — это диаметр, две последующие длина. Ноль на конце маркировки может означать цилиндрическую форму.
Для уточнения значений необходимо обратиться к документам батареи или производителю. У каждого из них может быть разные маркировки. Также отсутствует стандарт нанесения маркера даты производства.
Что понадобиться для самодельного ЗУ
В первую очередь, потребуется выбрать схему зарядки для элементов 18650. Ее выбирают по необходимым параметрам, а также по доступности деталей. Во вторую очередь – навыки чтения схем, изготовления печатных плат в домашних условиях (или, хотя бы, заказа в Китае, что сейчас не так уж дорого), пайки микросхем и других элементов, поиска ошибок и неисправностей. Если этого нет, не стоит и читать, что понадобятся:
- радиоэлементы согласно схеме;
- паяльник с набором расходников;
- плата или заготовка для нее и аксессуары для самостоятельного изготовления.
Также потребуется кейс для установки аккумуляторов на зарядку (с ним удобнее подключить аккумулятор к ЗУ).
Пластиковый кейс для подключения АКБ 18650.
Навыки лучше наработать отдельно, а потом браться за изготовление этих устройств. Они не очень сложны, но требуют осознанного подхода.