Шаговые двигатели нашли широкое применение в современной промышленности и самоделках. Их используют там, где необходимо обеспечить точность позиционирования механических узлов, не прибегая к помощи обратной связи и точным измерениям. Сегодня хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Мы подробно рассмотрим их устройство и способы управления такими крошечными моторчиками.
Шаговый двигатель — бесколлекторный (бесщёточный) электрический двигатель с несколькими обмотками (фазами), расположенными на статоре и магнитами (часто постоянными) на роторе. Подавая напряжения на обмотки статора, мы можем фиксировать положение ротора, а подавая напряжение на обмотки последовательно можно получить перемещение ротора из одного положения в другое (шаг), причём этот шаг имеет фиксированную угловую величину.
Мы не будем останавливаться на рассмотрении каждого типа шагового двигателя. Об этом в сети написано довольно много и хорошо, например здесь.
Хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Такие малыши имеются в свободной продаже. Но в сети, особенно в русскоязычной, очень мало информации по таким моторчикам. Потому, когда мне потребовалось использовать их в своём проекте, пришлось изрядно поискать информации и провести пару экспериментов.
Результатами своих поисков и экспериментами я поделюсь в этой статье.
Мы рассмотрим вопросы управления такими маленькими моторчиками, а именно:
- драйвер L293D + микроконтроллер ATtiny44;
- драйвер TMC2208 + микроконтроллер ATtiny44;
- микроконтроллер ATtiny44 (без драйвера).
Собственно вопросы тут может вызвать только последний пункт. Поверьте, я тоже был удивлён, когда наткнулся на ролик (вот он), где парень просто берёт и напрямую цепляет шаговый мотор к пинам микроконтроллера! Но давайте обо всём по порядку.
Что такое шаговый двигатель
Согласно наиболее популярному определению, это машина, которая преобразует электрическую энергию (ее она получает из сети) в механическую осуществляя дискретные (внимание, не непрерывные, это важно) перемещения ротора. Причем после каждого такого действия положение динамической части фиксируется.
Все отдельные передвижения одинаковой величины, и вместе они формируют полный оборот (цикл). Поэтому, подсчитав их количество, можно без труда и с высокой точностью вычислить абсолютную позицию инструмента. Общее их число, кстати, зависит от ряда моментов: характер подключения, вид устройства, способ задания команд и другие факторы.
Принцип работы шагового электродвигателя
- На клеммы подается напряжение, благодаря которому специальные щетки начинают вращаться.
- Под воздействием входящих импульсов ротор устанавливается в начальное положение, а затем перемещается под одним и тем же углом.
- Микроконтроллер (в большинстве случаев, хотя возможна и другая внешняя цепь управления) приводит в действие зубчатые электромагниты. Тот из них, к которому прикладывают энергию, притягивает шестерню, обеспечивая тем самым поворот вала.
- Остальные магниты по умолчанию выровнены относительно ведущего, поэтому они сдвигаются вместе с ним по направлению к очередной детали.
- Шестеренка вращается за счет переключения электромагнитов по порядку – от главного к следующему и так далее. При этом она выравнивается относительно предыдущего колеса, что завершает цикл.
Шаг шагового двигателя – это описанный выше алгоритм, и он повторяется необходимое для выполнения технологической операции количество раз.
Представление о внешнем виде и характере функционирования дополнит следующий рисунок:
Из него ясно, что к статору относятся четыре обмотки, расположенные крестообразно, то есть под углом в 90 0 друг к другу. Отсюда понятно, что и дискретное движение будет осуществляться на такую же величину градусов. Если напряжение подавать поочередно – U1, U2, U3 и так далее – ротор сделает полный оборот, а затем пойдет на второй круг, то есть начнет вращаться – до тех пор, пока его не потребуется остановить. Ну а, чтобы изменить направление его движения, достаточно задействовать витки в обратном порядке.
Знакомство
Сначала немного посмотрим на внешний вид нашего героя:
Он действительно очень маленький! Согласно умной книжке Петренко С.Ф. «Пьезоэлектрические двигатели в приборостроении», меньших размеров электромагнитные моторчики создать в принципе невозможно… то есть возможно, но с уменьшением диаметра проволоки, из которой изготавливают обмотки, всё больше энергии рассеивается в виде тепла в окружающую среду, что приводит к уменьшению КПД моторчика и делает их использование нерациональным.
Из примечательного, можно отметить, что его вал очень короткий и имеет специальную проточку для установки шестерни или рычага.
Отчётливо видны две обмотки, которые даже покрыты изоляцией разного цвета. Значит, наш моторчик относится, скорее всего, к классу биполярных шаговых двигателей
. Посмотрим как он устроен:
Считаю, наше знакомство с этими моторчиками будет не полным, если мы не посмотрим, что же у него внутри. Ведь всегда интересно заглянуть внутрь механизма! Разве нет?
Собственно, ничего необычного мы не увидели. Ротор намагничен. Подшипников нигде не наблюдается, всё на втулках. Задняя втулка запрессована в корпус двигателя. Передняя ничем не закреплена. Интересно, что корпус двигателя собирался точечной сваркой. Так что переднюю крышку корпуса пришлось спиливать.
Теперь перейдём к вопросу подключения и его электрическим характеристикам.
Убедимся, что он биполярный, прозвонив обмотки. Действительно биполярный, всё как на картинке выше. Сопротивление обмоток около 26Ом
, хотя продавец указал 14Ом. В описании сказано, что
напряжение питания 5В
. Хотя мы то с вами знаем, что для шагового двигателя важен ток, который будут потреблять его обмотки. Пробуем подключить.
Какие бывают шаговые двигатели: рассмотрим их разновидности
Режимы работы мотора определяют 2 характеристики: величина шага и усилие, прикладываемое для перемещения. Варьировать их можно, меняя метод подключения, строение обмоток или вала.
Соответственно, классификация приводов осуществляется по следующим параметрам:
- По конструкции ротора – его строение играет ключевую роль, так как от него зависит специфика взаимодействия с электромагнитным полем статора. Выделяют 3 варианта, причем каждый из них мы рассмотрим ниже, со всеми особенностями, плюсами и минусами.
- По виду (числу обмоток) – с ростом их количества вращение становится более плавным, но одновременно увеличивается и стоимость силового агрегата, хотя крутящий момент остается неизменным. Могут быть уни- и биполярными, в первом случае подключаются с ответвлением от средней точки, во втором – через 4 выхода.
Теперь обратим внимание на строение вала.
Шаговые приводы с переменным магнитным сопротивлением
Как следует хотя бы из названия, собственный источник постоянного поля у него отсутствует; кроме того, его ротор сделан из магнитомягкого материала и отличается зубчатой формой. Через ближайшие к статору участки контакта и осуществляется замыкание – с притяжением к полюсам, обеспечивающее дискретные движения. По своему исполнению он похож на шестерню, в которой сила вращения появляется за счет противоположных пар и попеременного протекания тока.
Ключевое преимущество – нет стопорящего момента, ведь поле, в других случаях способное воздействовать на арматуру, банально отсутствует. Вы получаете синхронный силовой агрегат, в котором ротор и статор поворачиваются одновременно и в унисон.
Обладая теми же размерами, что и другие разновидности, данные модели развивают меньший крутящий момент. Перемещение осуществляется на 5-15 градусов, а это сравнительно грубо и, зачастую, неточно. Так объясняется несколько ограниченная сфера применения реактивного шагового двигателя: где используется мотор данного типа, так в специфических станках, все детали которых производитель изготавливает самостоятельно.
С постоянными магнитами
Опять же, сразу ясно, в чем их особенность – в наличии собственного источника постоянного поля, являющегося
основой подвижного элемента и содержащего 2 и более полюсов. Именно последние и обеспечивают вращение ротора за счет подачи напряжения на обмотки и притяжения/отталкивания.
Перемещение может осуществляться либо полностью перпендикулярно предыдущему положению, либо наполовину; увеличивая число магнитных пар, можно регулировать длину, а значит и количество дискретных движений, доводя их общее число до 48 за полный оборот. Это позволяет очень точно устанавливать рабочий инструмент в нужное место и является конкурентным преимуществом силового агрегата.
Гибридные
Конструкция шагового двигателя этого типа была разработана, чтобы объединить достоинства двух предыдущих. Представляет собой цилиндрический источник поля, намагниченный продольно, то есть пару полюсов с особенными поверхностями – с нанесенными зубцами. Последние обеспечивают отличное удерживание, не снижая крутящий момент.
Практические плюсы:
- малый шаг – 0,9-50 – что позволяет прецизионное позиционирование за счет большого количества дискретных перемещений (до 400 за один цикл);
- высокая скорость и плавность работы.
Да, они дороже двух предыдущих видов, так как сложнее в изготовлении, но это относительный минус. Благодаря своим преимуществам это наиболее распространенные сегодня варианты, использующиеся в самых ответственных случаях: устанавливаются в ЧПУ-станках, в приборах современной робототехники, на медицинском и офисном оборудовании.
Замкнутые и разомкнутые системы
Системы позиционирования оси позволяют интеллектуальным контроллерам позиционировать оборудование с исключительной точностью. Выдается команда на перемещение в желаемую точку в трехмерном пространстве и машина реагирует очень быстро и точно.
Системы позиционирования обычно используют один из двух способов: системы с замкнутым и разомкнутым контуром. Так в чем же разница между этими двумя подходами к позиционированию?
В системах с замкнутым контуром обычно используются серводвигатели для управления скоростью и положением движущейся оси. Серводвигатели работают так же, как и любой обычный двигатель, когда на них подается питание, они вращаются. Это вращение принимает непрерывное плавное движение. Задача серводвигателя — не только приводить двигатель в действие, но и точно контролировать скорость.
Наряду со скоростью в замкнутой системе также требуется обратная связь по положению. Обычно это обеспечивается энкодером или линейной шкалой. Позиционная обратная связь с контроллером машины позволяет ему быстро двигаться к заданному месту, а затем плавно замедляться, чтобы остановиться на цели.
В системах с разомкнутым контуром нет устройства обратной связи для контроля скорости или положения. Вместо этого расстояние, которое необходимо преодолеть от текущего местоположения, делится системой управления машиной на несколько точных шагов определенного размера. Система управления также определяет оптимальную кривую скорости системы на основе предварительно определенных параметров. Затем команды поступают на шаговый двигатель в виде импульсов. Работа драйвера шагового двигателя заключается в преобразовании командных импульсов в фактические шаги привода двигателя далее шаговые двигатели продвигаются по этим шагам, достигая желаемого результата.
Принципы использования
Характерная для российского климата турбулентность ветра в приземных слоях приводит к постоянным изменениям его направления и интенсивности. Ветрогенераторы больших размеров, мощность которых превышает 1 Квт будут инерционными. В результате они не успеют полностью раскрутиться при смене направления ветра. Этому также мешает момент инерции в плоскости вращения. Когда боковой ветер действует на работающий ветряк, он испытывает огромные нагрузки, которые могут привести к его быстрому выходу из строя.
Целесообразно применять ветрогенератор малой мощности, изготовленный своими руками, имеющий незначительную инерционность. С их помощью можно заряжать маломощные аккумуляторы мобильных телефонов или использовать для освещения дачи светодиодами.
В дальнейшем лучше ориентироваться на потребителей, нетребующих преобразования вырабатываемой энергии, например, для подогрева воды. Нескольких десятков ватт энергии вполне может хватить для поддерживания температуры горячей воды или для дополнительного подогрева системы отопления, чтобы она не перемерзала зимой.
Какие драйвера для шаговых двигателей 3D принтера можно купить?
1. TMC2208, TMC2130, TMC2100. Выходной ток на обмотку с дополнительным охлаждением – до 2 А, пиковый выходной ток 2,5А. Напряжения питания силовой части: 4.75 — 36 В. Дробление шага: 1/2, 1/4, ⅛ и 1/16 с возможностью интерполяции до 1/256. Он используется для снижения уровня шума при работе с 8-битными микроконтроллерами. Может применяться в устройствах с маломощными режимами работы, а так же в оборудовании, где востребована высокая энергетическая эффективность моторов. TMC2208 построен на микросхеме от Trinamic и способен выдавать до 2.5 А на обмотку, чего достаточно для использования в 3D принтерах и ЧПУ. При этом решается проблема шумности работы шаговых двигателей за счёт эффективных алгоритмов формирования управляющих импульсов(StealthChop2™) и управления током.
Тихие драйверы, рекомендуем ставить именно их. Стоит дороже остальных около 15 $.
2. A4988 Допустимый выходной ток на обмотку с дополнительным охлаждением – до 2 А, без охлаждения – до 1 А. Напряжения питания силовой части: 8-35 В. Преимущества драйвера А4988 – наличие защиты от перегрузок и перегрева, возможность регулировки тока и несколько вариантов микрошага. Дробление шага: 1, 1/2, 1/4, 1/8, 1/16. На 9В значительно тише, чем на 12В, без потери крутящего момента. Резкое усиление звука происходит с 11В до 12В. Стоимость около 6 $.
Советуем к прочтению: Цементные резисторы: что они собой представляют и в каких случаях используются
4. DRV8825 Допустимый выходной ток на обмотку с дополнительным охлаждением – до 2 А. Напряжения питания силовой части: 8-45 В. Электрическая и механическая совместимость с драйвером A4988. Дробление шага: 1, 1/2, 1/4, 1/8, 1/16, 1/32. По отзывам имеют конструктивный недостаток, что выражения в появлении дефектов на поверхности отпечатка в виде вертикальных полос(полосы зебры). Недостаток можно устранить установив TL-Smoother, но гораздо рентабельнее будет купить вместо них TMC2208. Стоимость около 6 $.
Электрическая часть
Генератором в ветряк можно устанавливать шаговый двигатель (ШД) для принтера.
Даже при небольшой скорости вращения он вырабатывает мощность около 3 Вт. Напряжение может подниматься выше 12 В, что дает возможность заряжать небольшой аккумулятор. Остальные генераторы эффективно работают при скорости вращения более 1000 об./мин, но они не подойдут, поскольку ветряк вращается со скоростью 200-300 об./мин. Здесь необходим редуктор, но он создает дополнительное сопротивление и к тому же имеет высокую стоимость.
В генераторном режиме у шагового двигателя вырабатывается переменный ток, который легко преобразовать в постоянный, используя пару диодных мостов и конденсаторы. Схему легко собрать своими руками.
Установив за мостами стабилизатор, получим постоянное выходное напряжение. Для визуального контроля можно еще подключить светодиод. Чтобы уменьшить потери напряжения для его выпрямления применяются диоды Шоттки.
В дальнейшем можно будет создать ветряк с более мощным ШД. Такой ветрогенератор будет обладать большим моментом трогания. Проблему можно устранить, отключая нагрузку во время пуска и при малых оборотах.
Сглаживающее устройство TL-Smoother
Плата, которая соединяет шаговый драйвер и шаговый двигатель, уменьшая шум и вибрации на вашем 3D-принтере, снижая риск образования дефекта«полоса зебры».
Эта небольшая плата имеет восемь выпрямительных диодов, которые улучшают форму волны шагового двигателя, в частности, для более старых более дешевых шаговых драйверов, например DRV8825 и A4988. Улучшение формы волны снижает шум двигателя за счет уменьшения вибрации. Поскольку вибрации уменьшаются, качество печати также улучшается. Просто установите плату между драйвером и шаговым двигателем, ориентация не имеет значения. Для удобства в комплект входит небольшой 4-проводной разъем длиной 20 см, чтобы подключить плату к электронике. Стоимость около 7 $
Дефект полосы зебры или муар
Подключение шаговых двигателей
Выбор схемы подключения шагового двигателя зависит от:
- количества проводов в приводе;
- способа запуска механизма.
Существующие модели движков имеют 4, 5, 6 или 8 проводов. Прибор с четырьмя проводами можно подключать только к биполярным устройствам. Он оснащен двумя фазными обмотками, каждая из которых имеет два провода. Для пошагового подключения драйвера необходимо определить пары проводов с непрерывной связью с помощью метра.
В механизме с шестью проводами каждая обмотка имеет два провода и центральный кран. Движки этой модели характеризуются высокой мощностью и подключаются как к биполярным, так и к однополярным исполнительным устройствам.
В первом случае используется один центр-кран каждой обмотки и один конец провода.
Во втором случае используются все шесть проводов. Разделение провода осуществляется с помощью измерительного прибора.
Отличие пятипроводного мотора от шестипроводной модели заключается в том, что соединение центральных клемм представляет собой сплошной кабель, который выходит к центральному проводу.
Поскольку отделение одной обмотки от другой без разрывов не представляется возможным, необходимо определить центр провода, после чего соединять его с другими проводниками. Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Для успешной эксплуатации механизма нужно иметь в виду следующие нюансы:
- Номинальное напряжение производится первичной обмоткой при постоянном токе.
- Изменение начальной скорости крутящего момента прямо пропорционально изменению тока.
- Скорость понижения линейного момента на последующих высоких скоростях зависит от индуктивности обмоток и схемы привода.
Типичные схемы подключения ШД
Схема подключения 6-ти выводного шагового двигателя к драйверу GeckoDrive (биполярное последовательное подключение обмоток)
Схема подключения 8-ми выводного ШД с биполярным параллельным соединением обмоток к драйверу GeckoDrive
Схема подключения 8-ми выводного ШД с биполярным последовательным соединением обмоток к драйверу GeckoDrive
Управление шаговыми электродвигателями
Существуют три режима управления шаговым двигателем:
• полношаговый
• полушаговый
• микрошаговый.
Полношаговый режим управления
Первый способ был описан в примерах выше. Это попеременная коммутация фаз, фазы не перекрываются, в каждый момент времени к источнику напряжения подключена только одна фаза.
Способ называется на английском one phase on full step – одна фаза на полный шаг. Точки равновесия ротора совпадают с полюсами статора. Недостатком этого режима является то, что в один и тот же момент используется половина обмоток для биполярного двигателя, и только четверть для униполярного.
Есть вариант полношагового режима управления при котором в одно и то же время включены две фазы. Называется two-phase-on full step – две фазы на полный шаг. При таком способе ротор фиксируется между полюсами статора за счет подачи питания на все обмотки.
полушаговый режим
Это позволяет увеличить крутящий момент двигателя на 40%. Угол шага не меняется, просто ротор в состоянии равновесия смещен на пол шага. Этот способ позволяет от двигателя получить в два раза больше шагов на оборот ротора.
Каждый второй шаг включается одна фаза, а между ними — включаются сразу две.
В результате такой коммутации угловое перемещение шага уменьшается в два раза, или в два раза увеличивается число шагов. Полный момент получить в полушаговом режиме не удается.
Не смотря на это, полушаговый режим используется часто. Уж очень простыми методами он удваивает число шагов двигателя.
Надо помнить, что для обоих режимов справедливо то, что при остановке двигателя со снятием напряжения со всех фаз, ротор двигателя находится в свободном состоянии и может смещаться от механических воздействий.
микрошаговый режми
Чтобы зафиксировать положение ротора, необходимо формировать в обмотках двигателя ток удержания. Этот ток может быть значительно меньше номинального.
Способность шагового двигателя фиксировать свое положение при остановке позволяет обходиться без механических фиксаторов, тормозных систем и т.п.
Управление безколлекторными шд
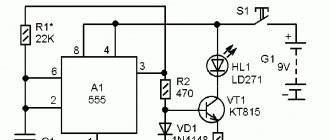
Для управления шаговым двигателем требуется контроллер. Контроллер, это схема, подающая напряжение к одной из катушек статора. Контроллер изготовлен на базе интегральной микросхемы типа ULN 2003 включающей в себя комплект составных ключей. Каждый ключ имеет на выходе защитные диоды, которые, позволяют подключать индукционные нагрузки, не требуя дополнительной защиты.
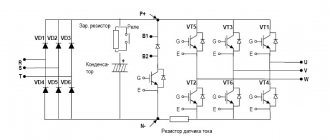
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора.
Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
Ветряной электрогенератор из старого сканера
В последнее время очень много идет разговоров об энергосберегающих технологиях. Это и тепловые аккумуляторы, и вечные лампочки, и солнечные батареи, и даже использование навоза в качестве источника альтернативной энергии и прочих сельскохозяйственных отходов.
Оказывается, как вариант можно получить бесплатную электроэнергию от двигателя ненужного сканера. О том, как сделать ветрогенератор из шагового двигателя мы и поговорим в этой статье.
Здесь, самым интересным является способ изготовления лопастей. Ниже предоставлена инструкция, с помощью которой вы сможете «переработать» старый сканер во впечатляющий генератор электричества.
Нам понадобятся:
- Старый сканер;
- Выпрямляющие диоды (в проекте использовано 8 диодов 1N4007);
- Конденсатор 1000 мкФ;
- Стабилизатор LM7805;
- Труба ПВХ;
- Пластиковые детали (см. ниже);
- Алюминиевые пластины (можно использовать любые другие).
Помимо флуоресцентной трубы и электронных компонентов, в сканере есть шаговый двигатель, именно он нам и понадобится. На фото показан четырехфазный шаговый двигатель.
Теперь, когда у нас есть все необходимые компоненты можно приступить к сборке выпрямителя.
Для каждой фазы нам понадобится 2 диода, т.е. всего 8 диодов. Выходное напряжение будет жестко стабилизировано с помощью ИС LM7805 и конденсатора емкостью в 1000 мкФ.
Для зарядки по порту USB необходимо два сопротивления в 15 кОм на обеих шинах передачи данных. Технические подробности смотрите в спецификации шины USB.
Собираем лопасти.
Это все!
Теперь осталось дождаться ветряного дня и опробовать устройство, как видно на фотографии — устройство стабильно генерирует напряжение 4.95 В.
Таким образом, теперь можно заряжать МР3-плеер или телефон совершенно бесплатно.
Контроллер управления шаговыми двигателями, сделанный своими руками
Задача проста: по готовой схеме и программе Павла Бахтинова с этого форума развести печатную плату, собрать и отладить контроллер управления шаговыми двигателями, установленными в монтировке астрономического телескопа. Далее, необходимо изготовить приличный корпус и пульт управления. Все начинается с деталек (сразу вспоминается закон Мерфи: «Ни один талант не смог пережить страсти к деталькам» ):
Работа над схемой:
Разводим печатную плату:
Фотошаблон готов:
Тут надо сказать несколько слов о моем НОУ-ХАУ в изготовлении фотошаблонов для перевода рисунка на печатную плату.
Обычно я их печатаю на принтере — чаще на струйном, реже на лазерном, т.к. термопленка давала непредсказуемую усадку после термообработки в лазернике (а шаблоны необходимы для двух сторон), поэтому невозможно было совместить два шаблона с достаточной точностью (до 0,15 мм).
Струйный принтер хорошо повторяет размеры, но не достаточно плотно заполняет черным цветом дорожки, кое-где они все же просвечиваются. Решение этой проблемы было вскоре найдено: печатаем не чистым черным, а чуть светлее в сторону желтого — принтер начинает добавлять к черной краске желтую (непрозрачную для УФ излучения) и дорожки, хотя и выглядят более прозрачными, после перевода фотоспособом получаются более плотные, практически без изьянов.
Советуем к прочтению: Для чего используется стабилитрон и как он работает
Главное — подобрать экспозицию:
Идет процесс травления печатной платы:
Протравлена полностью:
Сверлим отверстия диаметром от 0.7мм до 1.5мм самодельным сверлильным станком:
Паяльник старенький да удаленький:
Забиваем плату деталями:
Все детали запаяны:
Обратная сторона платы, начался процесс отладки:
Вот так будем ставить нагревающиеся элементы (те, что выше на рисунке с этой стороны платы стоят — интегральный стабилизатор и две микросхемы — драйверы моторов) вот на такие красивые радиаторы:
В данное время началась работа над пультом. Главное в пульте управления, считаю — эргономика, насколько только это уместно применить к той коробочке, которая получится после сборки на отечественных БОЛЬШИХ, но надежных микрокнопках.
Материалы и инструменты для изготовления ЧПУ станка из принтера
Простой самодельный станок с ЧПУ из принтера показан на фото. Он имеет рабочую зону размером 16 × 24 × 7 см. Способен обрабатывать текстолит (толщиной до 3 мм), фанеру (до 15 мм), пластик и дерево. Основное назначение — гравировка.
Для изготовления такого станка потребуются следующие материалы, детали и комплектующие:
Заранее следует приготовить такой инструмент:
Для измерений и разметки потребуется металлическая линейка и угольник.
Что можно полезного извлечь из принтера?
Из матричного принтера можно взять множество деталей для сборки станка с ЧПУ:
Важно! Аппарат следует разобрать максимально полно. Для сборки станка пригодятся практически все детали — винтики, гайки, шпильки и т. д.
Контроллеры ШД
Контроллеры – платы коммутации, используемые для преобразования управляющих команд, поступающих с ПК, в последовательность импульсов для драйверов. Плата может иметь дополнительный функционал – разъемы для подключения концевых ограничителей, силовые реле, разъемы для управления шпинделем. Подключается к компьютеру через LPT или USB интерфейс.
Многоканальные драйверы ШД –устройство объединяющее в себе драйвера ШД и плату коммутации. Подключаются к ПК непосредственно управляют ШД. Также в состав контроллера входят такие функциональные возможности как таймер СОЖ, конвертор ШИМ для инвертора, силовые реле, разъемы для подключения датчиков ограничения линейных перемещений. Драйвера могут исполняться на различное количество ШД.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Как подключить шаговый двигатель без контроллера
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель. Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Создание ветрогенератора
Создание ветрогенератора не обязательно означает изготовление крупного и мощного комплекса, способного обеспечивать электроэнергией целый дом или группу потребителей. Можно изготовить небольшой ветряк, представляющий собой, по сути, действующую модель серьезной установки. Целью такого мероприятия может быть:
- Ознакомление с основами ветроэнергетики.
- Совместные обучающие занятия с детьми.
- Экспериментальный образец, предваряющий строительство крупной установки.
Создание такого ветряка не потребует использования большого количества материалов или инструментов, можно обойтись подручными средствами. Рассчитывать на выработку серьезных объемов энергии не приходится, но для питания небольшого светильника на светодиодах может хватить. Основная проблема, существующая при создании небольших ветряков — это генератор. Его сложно создать самостоятельно, поскольку размеры устройства невелики. Проще всего использовать небольшой электродвигатель, позволяющий использовать его в режиме генератора.